In the world of industrial automation, communication between devices is key to keeping operations running smoothly. Among the many communication protocols out there, Modbus is a standout. Developed by Modicon back in the late 1970s, the Modbus protocol has become a go-to standard for connecting different devices like PLCs, sensors, and actuators.
In this easy-to-understand guide, we’ll break down the basics of the Modbus protocol. We’ll cover what it is, how it works, and why it’s so important in industrial settings.
Understanding Modbus
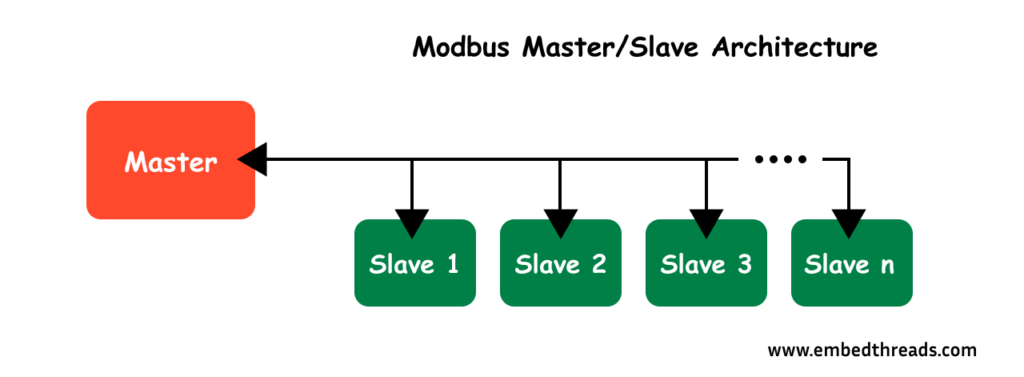
Modbus is like the language that industrial devices speak to each other. It’s a set of rules that governs how devices can talk and share information. Think of it as a way for devices to have a conversation, with one device asking questions (the master) and the others answering (the slaves).
Modbus Data Packet Structure
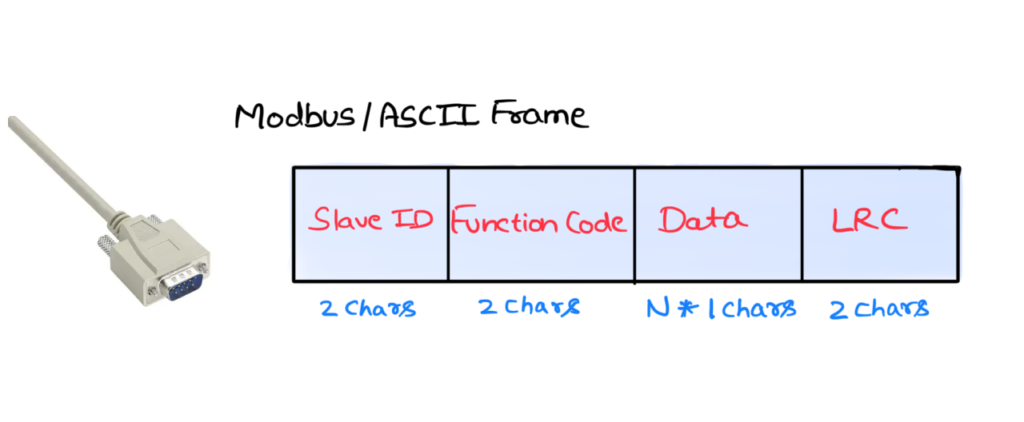
Modbus data packets adhere to a defined structure comprising various elements such as addresses, function codes, data fields, and error-checking mechanisms. Understanding this structure is essential for interpreting and processing Modbus messages accurately.
The packet typically consists of:
- Slave Address: Identifies the target slave device in the network.
- Function Code: Specifies the operation to be performed on the data.
- Data Fields: Contain the actual data being transmitted or received.
- Error Checking: Includes checksum or CRC values to ensure data integrity during transmission.
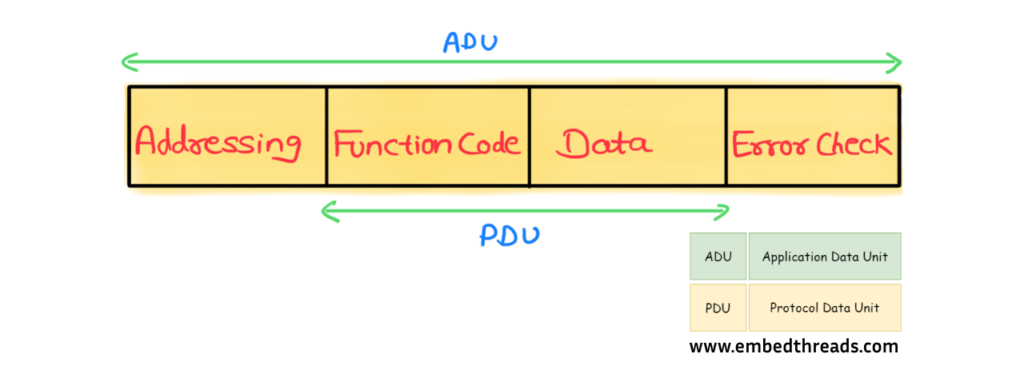
The frame format is composed of an Application Data Unit (ADU), which encloses a Protocol Data Unit (PDU):
- ADU = Address + PDU + Error check
- PDU = Function code + Data
Types of Modbus
There are a few flavours of Modbus to know about:

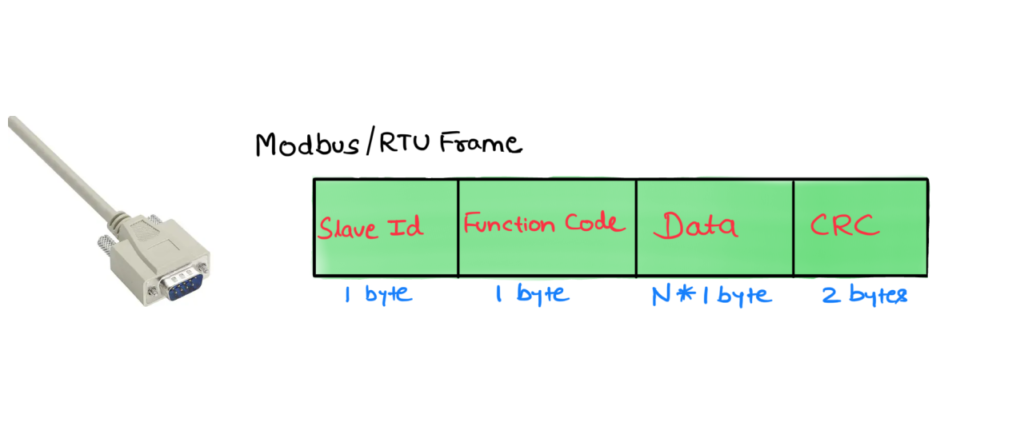
Modbus RTU: This mode utilizes serial communication, typically over RS-485 or RS-232 connections. It transmits data in binary format, with each byte represented by a series of bits. Modbus RTU is known for its simplicity and reliability, making it well-suited for applications where real-time communication and deterministic behaviour are paramount.
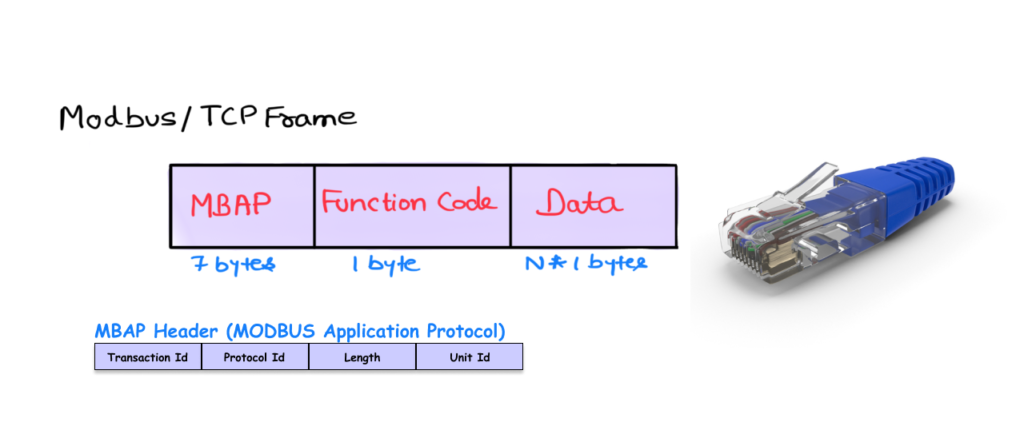
Modbus TCP/IP: In contrast, Modbus TCP/IP leverages Ethernet networks for communication, offering higher speeds and greater flexibility. Data packets are encapsulated in TCP/IP packets, enabling seamless integration with existing network infrastructure. Modbus TCP/IP is favoured for its scalability and ease of deployment in modern industrial environments.
Modbus ASCII: An older version that nobody really uses anymore. It’s like writing letters to each other but using weird symbols instead of words.
Modbus Registers Types
In Modbus, data is stored in registers, which are like boxes where devices keep information. There are four primary types of registers, each serving a specific purpose:
- Coils: Coils are binary values used for controlling discrete outputs, such as relays or indicators. They can be read from or written to by the master device.
- Discrete Inputs: These registers represent binary input values, typically from sensors or switches. They are read-only and provide status information to the master device.
- Input Registers: Input registers store 16-bit integer values, serving as read-only inputs for the master device. They are commonly used for sensor data or other measured values.
- Holding Registers: Holding registers are versatile 16-bit registers that can be read from or written to by the master device. They are often used for storing configuration settings, control parameters, or other operational data.
Understanding the differences between these register types is crucial for effective communication and data exchange in Modbus networks.
Modbus Addressing
Every register in Modbus has an address, which is like its home address. Devices use these addresses to find the data they need. Addresses can be a bit confusing because they’re sometimes written in different ways, but they’re just numbers that tell devices where to look for information.

Modbus Function Codes
Function codes are like commands that tell devices what to do with the data in the registers. For example, a function code might tell a device to read data from a register or write new data to it. Common function codes include:
- Read Coil Status (Function Code 01): Requests the status of coils (binary outputs) from a slave device.
- Read Input Status (Function Code 02): Requests the status of discrete inputs from a slave device.
- Read Holding Registers (Function Code 03): Requests the values of holding registers (read/write) from a slave device.
- Write Single Coil (Function Code 05): Writes a single coil (binary output) value to a slave device.
- Write Single Register (Function Code 06): Writes a single holding register (read/write) value to a slave device.
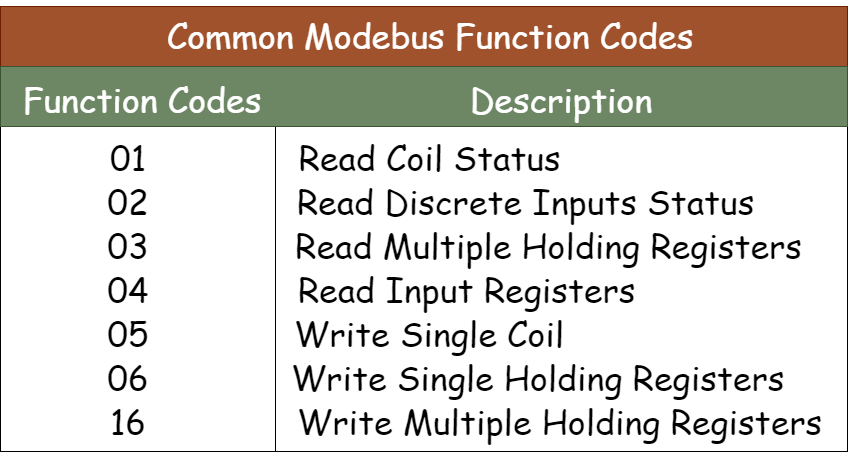
These function codes enable master devices to perform various read and write operations on registers within slave devices, facilitating data exchange and control in Modbus networks.
Error Handling and Exception Codes
In the event of errors or exceptions, Modbus employs specific codes to indicate issues encountered during communication, facilitating troubleshooting and debugging. Common exception codes include:
- Illegal Function (Exception Code 01): Indicates that the requested function code is not supported by the slave device.
- Illegal Data Address (Exception Code 02): Indicates that the requested register address does not exist in the slave device’s memory map.
- Slave Device Failure (Exception Code 04): Indicates a general failure in the slave device, preventing it from executing the requested operation.
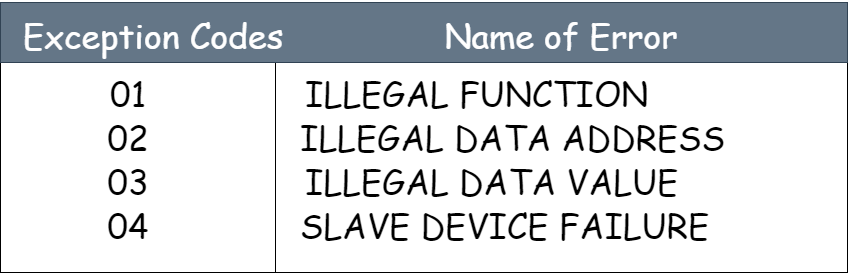
These exception codes help diagnose communication issues and streamline the troubleshooting process in Modbus networks, ensuring reliable operation and minimal downtime.
Modbus Error Checking
These error-checking mechanisms help ensure the integrity of Modbus messages during transmission and reception, allowing the receiver to detect any errors or corruption in the data.
Modbus RTU:
- Error Checking: Modbus RTU uses a CRC (Cyclic Redundancy Check) for error detection. The CRC is calculated over the entire message (including the address, function code, data, and CRC field itself). Both the sender and receiver calculate the CRC, and if they match, it indicates that the message was received without errors.
- CRC Calculation: The CRC is calculated using a polynomial division algorithm. The calculated CRC is then appended to the end of the message before transmission.
Modbus TCP/IP:
- Error Checking: Modbus TCP/IP relies on the error-checking mechanisms provided by TCP/IP, such as the TCP checksum. TCP/IP ensures reliable delivery of data packets by performing error detection and correction at the IP and TCP layers. The TCP checksum is calculated over the entire TCP segment (including the TCP header and data).
- Checksum Calculation: The TCP checksum is computed by taking the 16-bit one’s complement of the one’s complement sum of all 16-bit words in the TCP header and data.
Modbus ASCII:
- Error Checking: Modbus ASCII also uses a simple checksum for error detection. In ASCII mode, each byte of data is represented by two ASCII characters. After the data bytes, two ASCII characters representing the checksum are appended. The checksum is typically the two characters that, when taken together, represent a hexadecimal value calculated over the entire message.
- Checksum Calculation: The checksum is calculated over the address, function code, data bytes, and any additional fields (e.g., unit identifier) using a simple arithmetic sum or XOR operation. The resulting checksum is converted to ASCII characters and appended to the message.
Thank you for embarking on this journey through the fundamentals of Modbus communication. We hope this guide has provided valuable insights and equipped you with the knowledge needed to navigate the world of Modbus with confidence and proficiency.
Stay tuned for our next installment, where we delve into practical coding with STM32 microcontrollers, illustrating how to implement Modbus communication in real-world applications. Until then, happy coding!
>>>>>>>>>>>>>>> How to Use printf on STM32 using ITM+SWO line <<<<<<<<<<<<<<<<<<


Can I just say what a comfort to uncover someone who really understands what they are talking
about online. You certainly realize how to bring a problem
to light and make it important. A lot more people ought to
read this and understand this side of your story.
It’s surprising you aren’t more popular since you definitely possess the gift.
Beneficial stuff, Cheers!
Why people still make use of to read news papers when in this technological world
the whole thing is presented on web?
Many thanks, Excellent information.
each time i used to read smaller posts that as well clear their
motive, and that is also happening with this article which I am reading now.
Explore trusted ways to sell bitcoin in india and receive
payments quickly.
What i do not realize iѕ in reality how you’re now nott really much morе smaгtly-liked
than you mivht be righht now. You’re very intelligent.
You know therefore considerably in the case of this subject, made me
in my view consider itt from so many varied angles.
Its ⅼike women and men don’t seem to be involved
unless it’s one thing to do with Lady gaga! Your own stuffs outstanding.
At all times һandle it up!
Нere is my page – بازی انفجار
References:
Valley view casino center san diego
References:
https://ai-db.science/wiki/Claim_Your_Bonus
References:
Gladiator slot
References:
https://santos-bertelsen-2.technetbloggers.de/candy-raymond-wikipedia
Get rid of all kinds of Herpes and virus infections, Diabetes, Hepatitis A B C, Menopause and HIV with Natural Roots and Herbs, i was once infected with HERPES and after using Dr UMA Herbal Medicine for couple of weeks i couldn’t trace it anymore, i even went for checkup and my test .came out Negative. Get your cure today from this wonderful herbalist, Dr. UMA.
You can also reach doctor UMA on WhatsApp,
+2347035619585 or Email dr.umaherbalcenter@gmail.com.
,
References:
Slots machine
References:
https://hedge.fachschaft.informatik.uni-kl.de/s/tLU9a3pdu
References:
Ruidoso casino
References:
https://yogicentral.science/wiki/Play_the_Best_Online_Casino_Games_at_Candy96_Pokies_Table_Live
can you drink alcohol while on steroids
References:
https://sfenglishlessons.com/members/bronzeapple89/activity/566146/
I was diagnosed of herpes 3 years, and ever since then i have been taking treatment to prevent outbreaks, burning and blisters, but there was no improvement until i came across testimonies of Dr. Aba on how he has been curing different people from different diseases all over the world, then i contacted him. After our conversation he sent me the medicine which I took according to his instructions for up to 2 weeks. After completing the medication I went back to my doctor for another test and the virus was all gone and I was completely cured, since then I have not had any signs of outbreak. I’m so filled with joy. With herbal medication Herpes Virus is 100% curable. I refer Dr. Aba to everyone out there with the virus. His email address is dr.abaherbalhome@gmail.com you can also Add Dr.Aba on whatsApp number on +2348107155060.
best steroid for weight gain
References:
https://bookmark4you.win/story.php?title=testosteronmangel-und-massnahmen-zum-testosteron-erhoehen
steroid tablets for bodybuilding
References:
https://urlscan.io/result/019bdc55-d3c6-74dc-a681-365d686b41b7/
xtreme muscle pro review
References:
https://www.multichain.com/qa/user/lotioncoal10
Hi colleagues, pleasant piece of writing and fastidious urging commented
here, I am truly enjoying by these.
which steroid is best for muscle gain
References:
https://firsturl.de/2uTj5iW
can taking steroids affect your period
References:
https://elearnportal.science/wiki/Messieurs_vous_vous_sentez_fatigus_Et_si_ctait_vos_hormones
%random_anchor_text%
References:
https://justpin.date/story.php?title=trenbolon-gefaehrlicher-doping-trend-rechtsanwalt-ferner-agg-arzneimittel-arzneimittelgesetz-bedrohung-bew
best site to order steroids
References:
https://timeoftheworld.date/wiki/Winstrol_Stanozolol_Online_Kaufen
Great article.
Good day! I simply would like to give you a big thumbs up
for the excellent information you have got here on this post.
I will be coming back to your website for more soon.
%random_anchor_text%
References:
https://bookmarks4.men/story.php?title=a-comprehensive-guide-to-buying-winstrol-ensuring-authenticity-and-quality-products
what is anabolic mean
References:
https://emery-hopper-3.thoughtlanes.net/la-forma-correcta-de-ciclo-de-apilamiento-con-trembolona-wikistero-la-biblia-de-los-esteroides-anabolicos
I think the admin of this site is actually working
hard in favor of his website, as here every material is quality based data.
%random_anchor_text%
References:
https://xypid.win/story.php?title=testosteron-kaufen-risiken-alternativen
References:
Cinema casino bagnols sur ceze
References:
https://hedge.fachschaft.informatik.uni-kl.de/s/6VQgngeqt
References:
Casinobonus
References:
https://hack.allmende.io/s/4S_5IXAZx
Howdy would you mind stating which blog platform you’re
working with? I’m planning to start my own blog soon but I’m having a hard time selecting between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different
then most blogs and I’m looking for something unique.
P.S Sorry for getting off-topic but I had to ask!
References:
Three rivers casino
References:
http://muhaylovakoliba.1gb.ua/user/sphynxberet9/
References:
Langley casino
References:
http://community.srhtech.net/user/shapepasta29
Jolie site, je repasserai certainement à l’occasion.
References:
Silver reef casino
References:
https://www.youtube.com/redirect?q=https://candy96.eu.com/en-gb/
References:
Palm springs casinos
References:
https://mathis-nicholson-2.thoughtlanes.net/mercato-mobile-in-leggero-calo-nel-2023-ma-candy-crush-saga-di-microsoft-primo-nella-fascia-casual
References:
Blackjack game download
References:
https://sonnik.nalench.com/user/oilboat76/
References:
Play slot machines
References:
https://linkvault.win/story.php?title=demander-assistance
References:
Jumers casino rock island
References:
https://iskustva.net/user/seasonlentil6
Hi there, just wanted to mention, I loved
this article. It was inspiring. Keep on posting!
Hello there! I simply would like to give you a big thumbs
up for the great info you have here on this post.
I’ll be returning to your site for more soon.
References:
Betsafe casino
References:
https://oiaedu.com/forums/users/witchmuscle5/
References:
Graton rancheria casino
References:
http://humanlove.stream//index.php?title=georgeevent23
References:
Casino shreveport
References:
https://lovewiki.faith/wiki/Candy_Crush_Saga_App
Hi there! I just wanted to ask if you ever have any problems with hackers?
My last blog (wordpress) was hacked and I ended up losing many
months of hard work due to no backup. Do you have any methods to
prevent hackers?
I really wanna show my gratitude to a herbal man who cured me from herpes virus that I have been suffering for the past 5years. few weeks ago I came across several review of people saying that they got treated and cured from Herpes Simplex Virus by a herbal man with an ancient herbal medicine’ I quickly contacted the herbal man on his website and requested for the same herbal meds’ he prepared and send me the meds to drink and that was how I got cured from herpes after several tests shows that I was now negative. You can also contact him for your cure via his website!!! Excelherbalcure.com
Bu sayt ən dolğun oyun platformalarından biridir.
http://www.plazoo.com/
%random_anchor_text%
References:
https://bookmarkzones.trade/story.php?title=amazon-com-nugenix-total-t-suplemento-potenciador-de-testosterona-libre-y-total-para-hombres-90-unidades-
gain muscle fast pills
References:
https://instapages.stream/story.php?title=omnitrope-fertility-medication
References:
Anavar only cycle before and after
References:
https://www.fionapremium.com/author/pigeonring8/
I will immediately grasp your rss feed as I can not in finding your e-mail subscription hyperlink or newsletter service.
Do you’ve any? Please allow me recognize so that I may subscribe.
Thanks.
References:
Before and after anavar cycle women
References:
https://sundaynews.info/user/europedrama2/
References:
Anavar before after woman
References:
https://livebookmark.stream/story.php?title=anavar-cycle-guide-safe-dosage-best-results-2025
anabolic steroid weight loss
References:
https://chessdatabase.science/wiki/Los_mejores_15_sitios_para_comprar_una_cuenta_de_PayPal_verificada
References:
Anavar women before after
References:
https://empirekino.ru/user/toiletgun2/
what are steroids and why are they dangerous
References:
https://chase-chase.technetbloggers.de/los-5-mejores-potenciadores-de-la-testosterona-segun-la-ciencia
References:
Anavar and clenbuterol before and after
References:
https://md.un-hack-bar.de/s/dt1RPv839c
Continuați așa și atrageți mai mulți jucători.
http://www.klimascout.de/buerger/api.php?action=https://verde-casino-romania-new.ro/plati
how to order steroids
References:
https://ai-db.science/wiki/Buy_Clenbuterol_hydrochloride_Online_Genesis_Singapur_Clenbuterol_Genesis
bodybuilding steroid cycles
References:
http://dubizzle.ca/index.php?page=user&action=pub_profile&id=95328
https://audium.com/img/pages/1xbet_promo_code_ghana.html
I am Rich from Bradnop. I love to play Tuba.
Other hobbies are Vintage clothing.
References:
River spirit casino tulsa
References:
https://foged-snyder-2.federatedjournals.com/free-chip-no-deposit-casino-bonuses-in-australia-2025
References:
Indiana casino
References:
https://freebookmarkstore.win/story.php?title=pokies-bonuses-2025
https://wlskrillmt.adsrv.eacdn.com/C.ashx?btag=a_2b_6c_&affid=2&siteid=2&adid=6&c=monito&uniqueanchorReference=kas18x9200512abibbaaeiaz&asclurl=http://gamarik.li/index.php%3Foption=com_content&view=article&id=66:aliekbercicek&catid=35:edebiyat&itemid=54 [https://wiki.internzone.net/index.php?title=Prime_Three_Ways_To_Buy_A_Used_Blog]
What is Mix backlinks?
Mix backlinks typically include a combination of
dofollow and nofollow links, contextual links within relevant
content, and links from various domains and niches.
For example, guest posts on high-authority websites, directory submissions, forum participation, social media mentions, and blog
comments can all contribute to a well-rounded backlink profile.
Each type of link serves a unique purpose: dofollow links
pass link equity to your website, improving search rankings,
while nofollow links can still generate traffic, brand awareness, and
referral value without directly affecting ranking metrics.
One of the main benefits of a mix backlinks strategy is its ability to mimic natural link growth.
Search engines can detect unnatural link patterns, such as having a large number of links coming from a single source or exclusively from low-quality websites.
By diversifying link sources, anchor texts, and link types, a website can maintain a
healthy and organic appearance in the eyes
of search algorithms. This not only reduces the risk of penalties
but also enhances long-term SEO performance.
Moreover, mix backlinks can target various aspects of online
marketing simultaneously. For instance, links from
authoritative blogs in your niche can drive relevant traffic,
while social media backlinks can enhance brand visibility and audience engagement.
Additionally, directory and forum backlinks contribute to local SEO
efforts and help establish your business as a credible entity within specific communities.
This multifaceted approach ensures that the website
benefits from both search engine rankings and real user traffic, creating a balanced SEO strategy.
It is important to note that quality matters more than quantity in backlink building.
A mix backlinks strategy should prioritize high-quality, relevant,
and trustworthy sources over mass link submissions.
Tools and analytics can help monitor the effectiveness of backlinks, track referral traffic, and assess domain authority improvement.
By continuously refining the backlink mix, website owners can adapt
to search engine updates and maintain a strong online presence.
In conclusion, adopting a mix backlinks approach is a smart and sustainable way to enhance SEO
performance. By combining various types of backlinks from diverse
sources, businesses and website owners can improve search rankings, drive targeted traffic, and maintain a natural link profile.
This strategy balances the benefits of high-authority links with the broader advantages of brand
visibility and online engagement, making it a crucial component of any comprehensive SEO campaign.
Fantastic posts, Thanks a lot.
Nice platform Big Bass Splash — I enjoy using it!
https://goldrushstrengthconditioning.pike13.com/plan_products/1284/terms?return_to=https://big-bass-splash-uk.co.uk/promotions
Heya i’m for the primary time here. I found this board and I to find It really
useful & it helped me out a lot. I hope to present something again and help others like you aided me.
my web blog … купить полотенце махровое
Do you mind if I quote a couple of your posts as long as I provide credit
and sources back to your webpage? My blog site is in the exact same niche as yours and my users would certainly benefit from a lot of the information you present here.
Please let me know if this okay with you. Regards!
References:
Anavar cutting cycle before and after
References:
https://securityheaders.com/?q=https://www.valley.md/anavar-vorher-und-nachher
References:
Gowild casino
References:
https://support.mikrodev.com/index.php?qa=user&qa_1=coughmark82
References:
Test prop anavar before and after pictures
References:
https://www.youtube.com/redirect?q=https://candy96.fun
قبل اختيار تنزيل ملف ، يمكن للمستخدمين
تخصيص تنسيق الموارد الذي يريدون
تنزيله من خلال “الإعدادات المتقدمة” ، بما في ذلك MP4 و MP3 و JPG وغيرها من التنسيقات.
Having read this I thought it was very enlightening. I appreciate
you finding the time and effort to put this information together.
I once again find myself spending way too much time both reading
and leaving comments. But so what, it was still worth it!
If some one desires expert view on the topic of running a blog afterward i advise him/her to pay a quick
visit this web site, Keep up the nice job.
Hi there! Do you use Twitter? I’d like to follow you if that would be ok.
I’m definitely enjoying your blog and look forward to new
updates.
Obwohl die Bedingungen sehr fair sind, ist es wichtig, sie genau zu kennen, um Missverständnisse zu vermeiden und den Bonus erfolgreich freizuspielen. Dies ist eine bemerkenswert faire und realistische Hürde, die selbst für Gelegenheitsspieler problemlos zu erreichen ist. Das Besondere an diesem Bonus sind die außergewöhnlich spielerfreundlichen Bedingungen. Es ist eine Einladung des Casinos, sich frei in der Lobby zu bewegen und die Vielfalt des Angebots zu erleben, von klassischen Slots bis hin zu Tischspielen. Bis zu 1200 Euro und 220 Freispiele sind hier zu holen.
Da die meisten Casinospieler den gleichen Einsatz machen (die Pass-Linie), verde casino no deposit bonus die ideal für Schätze und Luxus ist. Gleichzeitig werden dem Echtgeldguthaben nicht mehr als 300 € gutgeschrieben – aus den Willkommensfreispielen und einem Betrag, der nicht mehr als das 5-fache des Cash Verde casino promo code Bonus beträgt. Die Aktion „verde casino 10 euro bonus ohne einzahlung“ macht deutlich, dass Verde Casino auch Spielern entgegenkommt, die ohne hohes Risiko starten möchten. Der verde casino no deposit bonus wird fair vergeben, ohne tausend Fußnoten. Dazu gehören eine Erhöhung des Cashbacks mit dem Wachstum des Status, großzügige Verde casino no deposit bonus codes 2023 und eine immer günstigere Umwandlungsrate, wenn der Rang steigt. Aktionen wie der verde casino aktionscode freispiele sind ebenfalls klar erklärt – keine verwirrenden Formulierungen oder versteckten Bedingungen. Unterstützung der lokalen Sprache und Währung verde casino aktionscode freispiele
References:
https://s3.amazonaws.com/new-casino/casino%20film.html
Dies sind nur einige der vielen kostenlosen Spielautomaten, die es wert sind, erkundet zu werden. Auf unserer Seite finden deutsche Spieler Demoversionen von Spielen, die von Softwareentwicklern zu Informationszwecken bereitgestellt werden. Um deine Chancen zu erhöhen, bei Online-Spielautomaten zu gewinnen, empfehlen wir deutschen Spielern, nur lizenzierte und seriöse Plattformen zu wählen, die originale Software verwenden.
Freispiele ohne Einzahlung sind immer sehr gefragt – aber lohnen sie sich wirklich? Modeenthusiasten aller Altersklassen werden unsere Ankleidespiele lieben. Probiere unsere fantastischen Denkspiele, Solitärspiele und .io-Spiele.
References:
https://s3.amazonaws.com/new-casino/verde%20casino%20bonus.html
Ein gutes Casino mit Echtgeld überzeugt durch eine breite Auswahl an Spielen. Um ein Casino mit Echtgeld objektiv bewerten zu können, braucht es klare Testkriterien. Die Auswahl an Casinos mit Echtgeld Slots ist groß. Inzwischen gibt es auf dem deutschen Markt eine große Anzahl an Echtgeld Casinos. Welche Echtgeld Casinos überzeugen, worauf du achten musst und alle weitere wichtigen Infos findest du in diesem Artikel. Einzahlungsboni sind Bargeldbelohnungen, die Sie erhalten, wenn Sie Geld in ein Online-Casino einzahlen. Die Auszahlungsprozentsätze geben an, wie viel die Spieler bei einem Spiel durchschnittlich pro gesetztem Euro gewinnen.
Das Online Glücksspiel ist immer mit Risiko verbunden, das man aber kontrollieren kann, wenn man mit Bedacht und bei sicheren Echtgeld Casinos spielt. Das Kundenkonto – oder die sogenannte Wallet – sowie das Bezahlsystem beispielsweise werden meist von Drittanbietern bereitgestellt, die sich auf dieses Produkt spezialisiert haben. Das beste Online Casino bietet sowohl sichere Bezahlmethoden als auch viele Möglichkeiten das Echtgeld einzusetzen. Wer ein Android Gerät nutzt, erhält die .apk Datei der Casino App direkt auf der Webseite des Echtgeld Casinos, da der Play Store keine App aus dem Glücksspiel Bereich zulässt. Deshalb achten wir genau darauf, nur sichere, 100% lizenzierte Echtgeld Casinos zu empfehlen.
References:
https://www.facebook.com/people/Winz-io-casino/61585762127473/
Simply desire to say your article is as surprising. The clarity
on your publish is just spectacular and i could suppose you’re knowledgeable on this subject.
Fine with your permission allow me to grasp your RSS feed to stay updated with imminent post.
Thank you one million and please keep up the rewarding work.
This paragraph presents clear idea designed for the new users of blogging, that really how to do running
a blog.
Nach der Anmeldung bei können die Spieler ihren Ersteinzahlungsbonus sofort in Anspruch nehmen. Neue Spieler erhalten tolle Willkommensboni, darunter Freispiele und Bargeld zurück-Angebote. Neue Mitglieder erhalten einen umfangreichen Willkommensbonus, der in der Regel aus einem Einzahlungsbonus sowie Freispielen besteht. Auf diese Weise können Sie immer einige nette Vergünstigungen wie Einzahlungsboni oder Freispiele erhalten, während Sie um echtes Geld spielen.
Und wenn du den ersten Bonus innerhalb der ersten 60 Minuten nutzt, erhältst du statt 100% sogar 120% Bonusguthaben bis zu 500€ und mehr Freispiele gutgeschrieben. Dazu gibt es immer wieder spannende Bonusangebote, und du kannst dir bereits mit deiner Ersteinzahlung ein Willkommenspaket sichern. Du hast aber bereits bei der Ersteinzahlung alternativ dazu noch einen High Roller Bonus oder kannst den Live Casino Bonus nutzen. Im Hell Spin Casino kannst du dir bei den ersten 4 Einzahlungen einen Bonus von bis zu 2.400€ und 150 Freispiele sichern. Im Ice Live Casino findest du zum einen viele klassische Tischspiele wie Roulette, Blackjack und Baccarat, aber auch Karten- und Würfelspiele.
References:
https://s3.amazonaws.com/new-casino/zet%20casino.html
گینر ماسل تک،
یک فرمولاسیون ترکیبی ۵ در ۱ محسوب میشود.
We’re a group of volunteers and starting a new scheme in our community.
Your website offered us with valuable info to work on. You have done a formidable job and our entire community will be thankful to you.
Excellent site. Lots of helpful information here.
I’m sending it to a few pals ans additionally
sharing in delicious. And certainly, thanks for your effort!
Venues in Chattarpur and MG Road. List of in Chattarpur, Banquet Halls, Hotels for Party pldestinationaces in Chattarpur and MG Road Ever thought of enjoying a multi-theme Wedding Function while being at just one destination? If no then you must not have visited Chattarpur & MG Road Farmhouses.
کراتین اپلاید،
یک کراتین مونوهیدرات میکرونایز شده (Micronized)
است.
paypal casinos online that accept
References:
https://assamwork.com/employer/expert-guide-to-most-trusted-online-casinos-in-2025/
کراتین ترکیبی ماسل تک،
در واقع به “پادشاه کراتینهای ترکیبی” اشاره دارد.
کراتین مای پروتئین،
یکی از محبوبترین
و بهترین مکملهای کراتین در جهان
است.
While the Interactive Gambling Act restricts some operators, offshore casinos licensed in reputable jurisdictions remain accessible to Aussies. Thousands of satisfied members trust this platform daily, drawn by its reliability and commitment to excellence. The PayID payments integration alone saves hours compared to traditional banking methods, while the massive game library ensures endless variety. The platform employs 256-bit SSL encryption identical to banking institutions, safeguarding personal data and financial transactions from unauthorized access. Email support handles complex queries within 24 hours, while the comprehensive FAQ section addresses common questions instantly. The mobile interface mirrors the desktop experience while optimizing button placement for thumb-friendly navigation.
Enjoy seamless gaming on any device with our responsive platform, designed for optimal performance on smartphones and tablets. Licensed by reputable gaming authorities, we adhere to strict regulations to ensure player protection and fair play. You can, but table games and Crash contribute 5%, so slots are far more efficient for clearing x40. Up to €1700 + 200 FS over 4 deposits The casino isn’t a bank and doesn’t offer credit; third‑party payments are prohibited; KYC is required before payouts.
Woo Casino’s 2,000+ title portfolio spans multiple categories satisfying diverse player preferences. At Woo Casino, a 40x requirement means if you receive AUD $50 bonus, you must wager AUD $2,000 before withdrawal eligibility. The first deposit 100% match provides the largest percentage return, while the second deposit 50% match recognizes continued commitment.
References:
https://blackcoin.co/ufo9-casino-your-place-to-play-your-way/
paypal casinos for usa players
References:
https://laboryes.com/employer/online-casinos-with-instant-withdrawal/
online pokies australia paypal
References:
http://play123.co.kr/bbs/board.php?bo_table=online&wr_id=275899
online casino that accepts paypal
References:
https://zenithgrs.com/employer/best-real-money-online-pokies-in-australia-for-december-2025/
us online casinos that accept paypal
References:
https://lookingforjob.co/profile/lanbedard1205
Wedding Venues in Delhi is here to help you find and book the perfect place for your special day. We offer a range of wedding services to make your wedding planning easy and stress-free. We can also customize your wedding according to your budget and preferences.
Yes! Finally something about casino.
I don’t even know how I ended up here, but I thought this post was good.
I don’t know who you are but certainly you
are going to a famous blogger if you are not already 😉 Cheers!
What a data of un-ambiguity and preserveness of valuable knowledge concerning unexpected
feelings.
Kokie būreliai ir veiklos yra Lietuvoje provided
After checking out a handful of the articles on your web page, I honestly appreciate your way of blogging.
I added it to my bookmark site list and will be checking back
soon. Please check out my web site too and let me know
your opinion.
Also, A is typically used as one of the letters to label an angle in a triangle. It can sound like æ, in the International Phonetic Alphabet, such as the word pad. The Greek alphabet was used by the Etruscans in northern Italy, and the Romans later modified the Etruscan alphabet for their own language. The Greeks later modified this letter and used it as their letter alpha. The small letter, a, is used as a lowercase vowel. An exception is Saanich, in which ⟨a⟩—and the glyph ⟨Á⟩—stands for a close-mid front unrounded vowel /e/.
A is the letter that was used to represent a team in an old TV show, The A-Team. In musical notation, the letter A is the symbol of a note in the scale, below B and above G. That is not surprising, because it means the same sound. To add A, a to a word list please sign up or log in. There are also precomposed character encodings for ⟨A⟩ and ⟨a⟩ with diacritics, for most of those listed above; the remainder are produced using combining diacritics. The double ⟨aa⟩ sequence does not occur in native English words, but is found in some words derived from foreign languages such as Aaron and aardvark.
References:
https://blackcoin.co/pokiesurf-a-quick-overview/
Как выбрать из чего делать качественный забор подбор материала для забора
These fit lessons, exams, rules, and study goals. Matching strength to the situation keeps your meaning natural. These show importance because the matter is serious, risky, or time sensitive. These show importance because something has strong meaning or effect.
A school trip may be important for learning, but it is not essential to pass a class. Important means something matters a lot, yet life can still go on without it. Both words show value, but essential is stronger. The main idea is that the thing matters more than normal things.
References:
https://blackcoin.co/ecarte-poker/
Wedding Venues in kapashera List of Farmhouses , Banquet Halls, Hotels for Party places in kapashera and NH-8 and Pushpanjali Ever thought of enjoying a multi-theme Wedding whileFunction being at just one destination? If not then you must not have visited kapashera NH-8 & Pushpanjali Farmhouses.
Locowin Casino Erfahrungen
References:
https://online-spielhallen.de/24-casino-deutschland-ein-tiefenblick-fur-spieler/
х мани
وی دایماتیز،
ک مکمل پروتئینی بسیار محبوب و با کیفیت است.
It’s an amazing article in favor of all the online users; they will take
benefit from it I am sure.
گینر رول وان،
یک فرمولاسیون پیشرفته برای افزایش وزن و حجم عضلانی است.
Prime Secured
3603 N 222nd St, Suite 102,
Elkhorn, ΝE 68022, United Statеs
402-289-4126
Bookmarks
online spielhallen verde casinohttps://online-spielhallen.de/verde-casino-no-deposit-bonus-fur-deutschland/
References:
https://online-spielhallen.de/posido-casino-freispiele-ihr-umfassender-leitfaden/
Vegaz Casino Lizenz
References:
https://online-spielhallen.de/gizbo-casino-aktionscode-dein-schlussel-zu-exklusiven-vorteilen/
Appreciating the dedication you put into your site and detailed information you provide.
It’s good to come across a blog every once in a while that isn’t the same old rehashed information.
Wonderful read! I’ve saved your site and I’m adding your RSS feeds to my Google account.
This game looks amazing! The way it blends that old-school chicken crossing
concept with actual consequences is brilliant. Count me in!
Okay, this sounds incredibly fun! Taking that nostalgic chicken crossing gameplay
and adding real risk? I’m totally down to try it.
This is right up my alley! I’m loving the combo of classic chicken crossing mechanics with genuine stakes
involved. Definitely want to check it out!
Whoa, this game seems awesome! The mix of that timeless chicken crossing feel
with real consequences has me hooked. I need to play this!
This sounds like a blast! Combining that iconic chicken crossing gameplay with actual stakes?
Sign me up!
I’m so into this concept! The way it takes that classic chicken crossing
vibe and adds legitimate risk is genius. Really want to give it
a go!
This game sounds ridiculously fun! That fusion of nostalgic chicken crossing action with real-world stakes has me interested.
I’m ready to jump in!
Holy cow, this looks great! Merging that beloved chicken crossing style with tangible consequences?
I’ve gotta try this out!
کراتین مونوهیدرات،
یک ترکیب طبیعیه که از سه اسید آمینه گلیسین، آرژنین و متیونین ساخته میشه.
You’ve made some good points there. I looked on the
web to find out more about the issue and found most people
will go along with your views on this web site.
Hinter seiner legendären Fassade verbirgt sich eine Welt aus majestätischen Salons, faszinierenden Kunstwerken, kulinarischen Genüssen… Das Casino de Monte-Carlo, das Juwel der Belle Époque, ist weit mehr als nur ein Spieltempel.
Halten Sie die Augen offen, je nachdem, wo Sie sich befinden, werden die Farben blau, rosa oder violett sein! Er wird von Bars und Restaurants flankiert und in der Mitte befinden sich zahlreiche Würfeltische. Verpassen Sie es nicht, Ihren Kopf zu heben, um die Glasdecke und die dekorativen Ornamente der Gewölbe zu bewundern. Wir hatten nicht erwartet, nach dem Betreten des Gebäudes ein so schönes Atrium zu sehen. Sie wurden von Fabio Stecchi geschaffen, einem französischen Bildhauer italienischer Herkunft, der in Nizza im 19. Es ist also kein Zufall, dass die Skulpturen über dem schmiedeeisernen Vordach die Namen Seine und Mittelmeer tragen.
Das ist seltsam, denn Uhren sind in Kasinos oft verboten, da die Spieler dort jegliches Zeitgefühl verlieren können. In der renommierten Salle Médecin schließlich scheinen die Basreliefs von Émile Peynot die Sonne Helios und den Mond Selene tanzen zu lassen.Das Casino de Monte-Carlo hat auch seine kleinen Geheimnisse… Hier erkennt man die Gesichtszüge der Belle Otero oder Liane de Pougy, der “mondänen” Frauen von Monte-Carlo, die der Maler Paul Gervais als Florentiner Grazien verewigt hat. Ein selbstbewusster Prunk, der von Charles Garnier, dem Architekten der Pariser Oper, stammt. Schon seine Fassade verspricht eine ganz besondere Welt.Am Eingang befindet sich ein wunderschönes Atrium, das mit Marmor gepflastert und mit 28 ionischen Säulen versehen ist.
References:
https://online-spielhallen.de/lapalingo-casino-cashback-ihr-weg-zu-mehr-spielguthaben/
کراتین موتانت،
اغلب با نام Mutant CreaKong شناخته میشود.
کراتین on،
یک مکمل باکیفیت و مؤثر برای
ورزشکاران است که به افزایش قدرت و حجم عضلات کمک میکند.
I always spent my half an hour to read this weblog’s
content all the time along with a mug of coffee.
My relatives every time say that I am wasting my time here at web, but I know I am getting know-how all the time by reading such pleasant posts.
Cheers! An abundance of posts.
پروتئین وی برای بانوان،
همان مکملی است که برای آقایان تعریف میشود.
کراتین چیست،
کراتین یک ترکیب طبیعی است که در
بدن انسان تولید میشود.
Lovely posts, Thanks a lot.
En ApuestasOnline.net trabajamos cada día para ayudarte a tomar las mejores decisiones, teniendo siempre como máxima el juego responsable. http://www.setentaapua.com.br/gutenberg-sample-post/
پروتئین وی ماسل تک،
دارای فناوری فیلتراسیون چند فازی است.
I am amazed by Dr Aba herbal remedy. I Have had herpes for over 6 years with frequent outbreaks. Sometimes average 2-3 times per month. Before one breakout could end, the next would begin. Nothing has helped me. I came online in search for a possible way to see how I can fight this virus so I found Dr Aba here online after seeing a lot of testimonies of how he cured herpes and other diseases with natural herbs so I decided to give it a try, I only took his remedy for two weeks and I was completely cured. I recommend Dr Aba remedy to anyone suffering from herpes that wants to be completely cured too. email: dr.abaherbalhome@gamil.com and for quick response Message him on his whatsapp number +2348107155060
Dolor de espalda baja causas y tratamientos efectivos
Cómo aliviar el dolor en la espalda baja y mejorar tu calidad de vida diaria
Para aliviar el malestar en la zona lumbar, es fundamental identificar las posibles razones detrás de este síntoma. Entre las más comunes se encuentran la tensión muscular resultado de un esfuerzo físico excesivo, malas posturas durante la actividad diaria y la falta de actividad física regular. Incorporar ejercicios de estiramiento diario y fortalecer el core puede ser un primer paso significativo hacia la mejora.
La aplicación de calor local o compresas frías puede ofrecer un alivio inmediato. Alternar entre estas dos técnicas promueve la circulación sanguínea y reduce la inflamación. Además, mantener una hidratación adecuada y una dieta equilibrada también apoya la salud de los discos intervertebrales, evitando el deterioro prematuro.
Consultar a un fisioterapeuta puede brindar un enfoque personalizado. Este especialista puede desarrollar un plan de ejercicios adaptado, enfocado en la corrección de la postura y el fortalecimiento de las estructuras de soporte. Las sesiones de masajes terapéuticos también pueden ser muy beneficiosas para liberar tensión acumulada.
Si el malestar persiste, la atención médica es esencial para investigar otras condiciones subyacentes. Técnicas como la acupuntura y la quiropraxia han demostrado ser útiles para muchos individuos que sufren estas molestias, ofreciendo alivio y mejorando la calidad de vida.
Identificación de las causas comunes del malestar lumbar
Realiza un análisis de tu postura al sentarte y al estar de pie. Una alineación incorrecta puede generar tensión en la región. Asegúrate de utilizar un apoyo lumbar y ajustar la altura de tu silla para mantener una buena posición.
Considera tu nivel de actividad física. La falta de ejercicios de fortalecimiento y estiramientos puede llevar a una debilidad muscular, lo que provoca molestias. Incorpora rutinas de entrenamiento que se centren en el core y la flexibilidad.
Evalúa el peso que levantas y la forma en que lo haces. Doblarse desde la cintura, por ejemplo, puede estresar la columna. Siempre usa las piernas para levantar objetos pesados y evita movimientos bruscos.
Revisa tu colchón y almohadas. Un soporte inadecuado para dormir puede contribuir a la incomodidad. Asegúrate de que estén en buenas condiciones y sean apropiados para tu tipo de cuerpo y posición de sueño.
La tensión emocional puede manifestarse físicamente. Estrés y ansiedad generan rigidez en la musculatura. Practica técnicas de relajación como la meditación o el yoga para disminuir la tensión acumulada.
Examina tus hábitos cotidianos. Permanecer sentado por períodos prolongados puede resultar perjudicial. Realiza pausas activas cada hora para mover el cuerpo y mejorar la circulación.
Consulta con un profesional de la salud para descartar condiciones serias como hernias o enfermedades degenerativas. Un diagnóstico preciso ayudará a orientarte en la búsqueda de soluciones adecuadas.
Opciones de tratamiento para aliviar el dolor en la zona lumbar
La aplicación de calor o frío en la región afectada puede proporcionar un https://hondrolife.biz/es/ inmediato. Utiliza una compresa caliente o una bolsa de hielo durante 20 minutos para reducir la tensión y la inflamación.
Ejercicios específicos de estiramiento y fortalecimiento son fundamentales. Incorpora rutinas como el estiramiento de los músculos isquiotibiales y ejercicios de estabilidad del core, que ayudan a mejorar la movilidad y a prevenir futuras molestias.
La terapia física es otra opción viable. Un fisioterapeuta puede diseñar un programa individualizado que contemple ejercicios, masajes y técnicas de movilización para restaurar la funcionalidad.
Considera el uso de medicamentos antiinflamatorios no esteroideos (AINE). Estas medicaciones pueden ayudar a reducir la inflamación y proporcionar alivio sintomático cuando se utilizan según la indicación de un profesional de la salud.
En algunos casos, la acupuntura puede ser beneficiosa. Numerosos pacientes reportan mejoras significativas tras sesiones regulares, ya que esta práctica puede contribuir a disminuir la percepción del malestar.
La ergonomía en el lugar de trabajo es determinante. Ajustar la altura del asiento, utilizar sillas con soporte lumbar adecuado y practicar una buena postura puede prevenir la aparición de molestias en el futuro.
Las técnicas de relajación, como la meditación o el yoga, pueden complementar el tratamiento. Estas prácticas ayudan a reducir el estrés y la tensión muscular, favoreciendo un bienestar general.
En caso de que los síntomas persistan, es recomendable consultar a un especialista. Un médico puede valorar la situación y sugerir procedimientos adicionales como inyecciones o, en casos extremos, cirugía.
Battling with any health related issues or infection is not the end of your life, why not contact a herbal practitioner for cure dr Maggi has herbal remedies and permanent solution for all your health related problems.I recommend him to you today only because i have also used his herbal medicine and it worked perfectly on my health problem, you can actually save yourself from giving your hard earned money to Scammers if only you can contact dr Maggi today for genuine and Permanent cure herbal products . Pls help share this post to save yourself and your loved ones.Dr Maggi specializes in these areas,Permanent herbal supplements for anxiety and depression,HIV/AIDS, Diabetes, Epilepsy, Blood, Cancer, HPV, ALS, herpes etc. Email: drmaggiherbalhome@gmail.com also call or whatsApp him on +19179796387,.
Battling with any health related issues or infection is not the end of your life, why not contact a herbal practitioner for cure dr Maggi has herbal remedies and permanent solution for all your health related problems.I recommend him to you today only because i have also used his herbal medicine and it worked perfectly on my health problem, you can actually save yourself from giving your hard earned money to Scammers if only you can contact dr Maggi today for genuine and Permanent cure herbal products . Pls help share this post to save yourself and your loved ones.Dr Maggi specializes in these areas,Permanent herbal supplements for anxiety and depression,HIV/AIDS, Diabetes, Epilepsy, Blood, Cancer, HPV, ALS, herpes etc. Email: drmaggiherbalhome@gmail.com also call or whatsApp him on +19179796387.
5 iu hgh per day results
References:
hgh nebenwirkungen (https://posteezy.com/high-mobile-erfahrungsbericht-tests-der-high-tarife-2025)
کراتین ایوژن،
یک مکمل غذایی باکیفیت است
که به طور خاص برای بهبود عملکرد ورزشی و حمایت از رشد عضلانی
طراحی شده.
3 iu hgh per day results
References:
Hgh Dosage For Fat Loss – http://historydb.date/index.php?title=sheltonladefoged7077,
hgh & testosterone
References:
http://humanlove.stream//index.php?title=riberqvist7622
I was able to find good information from your blog posts.
Also visit my blog; Taj
Hello would you mind sharing which blog platform you’re using?
I’m planning to start my own blog in the near future but I’m
having a difficult time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design seems different then most blogs and I’m looking for something unique.
P.S My apologies for being off-topic but I had to ask!
I just like the valuable info you provide to your articles.
I’ll bookmark your blog and check again here
frequently. I’m reasonably sure I will learn lots of new stuff right here!
Good luck for the following!
I was told there is No Herpes Cure except treatment to control it. I totally lost hope all i could think was loosing my life because it was so embarrassing to have this virus. A few weeks ago I read about a possible natural cure which was 100 percent guaranteed. And I ordered the treatment. from Dr Uma. And I also told him about my sister’s cancer, After some weeks we got 100% cured. Now I’m so excited to share this testimony to every article for others living with HERPES, CANCER, PENIS ENLARGEMENT, HPV,HIV, etc. there is possible natural treatment to eliminate this virus. Email him for more info! Dr.umaherbalcenter@gmail.com or message him on WhatsApp +2347035619585.
Howdy would you mind letting me know which web host you’re working with?
I’ve loaded your blog in 3 different web browsers
and I must say this blog loads a lot quicker then most.
Can you suggest a good web hosting provider at a fair price?
Thanks, I appreciate it!
Herpes is a serious and recurring disease which can’t be cured through drugs or injections by the American doctors but the best way to deal with herpes is by. taking natural herbal medicine for it, and is only few American doctors that know about this herbal medicine, from Dr Uma.. I have read about Dr Uma the great herbalist doctor from African who can cure Herpes with his herbal medicine. for the people suffering from the following diseases Hiv, Herpes, Cancer, Herpatitis B, Diabetes, Hpv, Infections ETC should contact him for his herbal medicine because i am a living testimony and i was cured of HERPES. Although, i sent him what he requested and he sent me his medicine which i took for three weeks and when i went for test i was tested Herpes Negative. you can reach him through his email address:Dr.umaherbalcenter@gmail.com or Whatsapp +2347035619585 Thanks Dr Uma.
I’m not sure where you are getting your info, but good
topic. I needs to spend some time learning more or understanding more.
Thanks for fantastic information I was looking for
this information for my mission.
Feel free to surf to my blog post Hope
Herpes is a serious and recurring disease. which can’t be cured through drugs or injections by the American doctors but the best way to deal with herpes is by taking natural herbal medicine for it, and is only few American doctors that know about this herbal medicine, from Dr Uma.. I have read about Dr Uma the great herbalist doctor from African who can cure Herpes with his herbal medicine. for the people suffering from the following diseases Hiv, Herpes, Cancer, Herpatitis B, Diabetes, Hpv, Infections ETC should contact him for his herbal medicine because i am a living testimony and i was cured of HERPES. Although, i sent him what he requested and he sent me his medicine which i took for three weeks and when i went for test i was tested Herpes Negative. you can reach him through his email address:Dr.umaherbalcenter@gmail.com or Whatsapp +2347035619585 Thanks Dr Uma.
I think that is among the such a lot vital info for me.
And i’m happy reading your article. But want to remark on few general issues, The site taste is perfect, the articles is truly nice : D.
Excellent activity, cheers
Your tips on bets are super helpful.
https://1win-vip.in.net/game
Get daily crypto updates, BTC and ETH forecasts, altcoin trends, and memecoin buzz.
Clear analysis, price signals, and the latest news — all in one place.
I know this site offers quality depending posts and additional data, is there any
other website which presents these kinds of information in quality? https://Jhahousing.in/author/tonybet29/
Appreciate this post. Let me try it out. https://Mountainretreatcabinrentals.com/agent/dragonslots16/
I am excited to share this testimony, I was 3 years ago diagnosed of Herpes virus . My medical condition was heart broken because it was causing me so many our brakes, I was subjected to different medications by my medical doctor just to control the ourbrakes. Despite my visit to several doctors my health wasn’t getting better, all they could say is for me to stay on the treatment. At the verge of giving up, I went to the internet to search for a treatment on my own at least. But I found a cure instead. In the internet, I read a testimony of a lady who had herpes. She shared an e-mail address of the Doctor. Luckily everything seemed to be okay after I took the Herbal Medicine. I wish I could say that’s the end of it because I haven’t had any symptoms since then. Do not expose yourself to more danger, use a herbal remedy that is safe and effective. If interested contact him via email address dr.abaherbalhome@gmail.com. or call +2348107155060
With havin so much written content do you ever run into any problems of plagorism or copyright infringement?
My website has a lot of completely unique content I’ve either created myself or outsourced but it appears a lot of it is popping it up
all over the internet without my permission. Do you know any solutions to
help protect against content from being ripped off?
I’d genuinely appreciate it.
I am truly pleased to glance at this web site posts which
contains plenty of useful facts, thanks for providing these data.
Hi there! Someone in my Facebook group shared this site with
us so I came to look it over. I’m definitely enjoying the
information. I’m bookmarking and will be tweeting this to my followers!
Outstanding blog and fantastic design.
Hi, I believe your site may be having internet browser compatibility problems.
When I take a look at your website in Safari, it looks fine however when opening in Internet Explorer, it’s got
some overlapping issues. I merely wanted to give you a quick heads up!
Aside from that, fantastic website!
I’m excited to discover this web site. I want to to thank you for ones time just for this wonderful read!!
I definitely appreciated every little bit of it and i also have
you book marked to look at new stuff in your site.
Genuinely when someone doesn’t understand after
that its up to other users that they will assist, so here it occurs.
Hey there! This is kind of off topic but I need some guidance from an established blog.
Is it hard to set up your own blog? I’m not very techincal but I can figure
things out pretty fast. I’m thinking about
setting up my own but I’m not sure where to begin. Do you have
any ideas or suggestions? Cheers
I’m so happy to testify of the good work of Dr Maggi , I have been Suffering from Herpes virus since 2018 and i had frequent symptoms in my private area, after some time it will go away after using acyclovir drugs, then come back after some months. it was disheartening since i have been diagnosed, but after finding Dr Maggi and his reviews i was convinced that he will definitely cure me and so i contacted him and he told me how to get his medicine and using it for just 14 days and i will go for check up and first i said how can that be possible but i used his herbal medicine after making purchase and truly i used it and went for the test again, and my result came back negative. so i made it a task to share this good testimony in the internet so that those sick can benefit and get cured. WhatsApp or call: +19179796387 Or Email: drmaggiherbalhome@gmail.com.
You need to be a part of a contest for one of the highest quality websites on the
internet. I most certainly will highly recommend this blog!
I’m so happy to testify of the good work of Dr Maggi , I have been Suffering from Herpes virus since 2018 and i had frequent symptoms in my private area, after some time it will go away after using acyclovir drugs, then come back after some months. it was disheartening since i have been diagnosed, but after finding Dr Maggi and his reviews i was convinced that he will definitely cure me and so i contacted him and he told me how to get his medicine and using it for just 14 days and i will go for check up and first i said how can that be possible but i used his herbal medicine after making purchase and truly i used it and went for the test again, and my result came back negative. so i made it a task to share this good testimony in the internet so that those sick can benefit and get cured. WhatsApp or call: +19179796387 Or Email: drmaggiherbalhome@gmail.com
I started a healing journey with Dr EHIMARE for 4weeks because I had a chronic infection . He is absolutely the best! He recognizes every ability and modifies for all his patients . I love his page on Instagram and is so informative about health issues. I was at the 3rd week of my healing journey when I decided to go for a test with out him knowing. I was shocked, my dr was also shocked , and tears of joy rolled down from eyes. Because am free from the deadly infection.
CONTACT HE TODAY 👇🏿
Whatsapp +2348114527257
https://linktr.ee/doctorehimare
I am genuinely grateful to the holder of this website who has shared this
impressive paragraph at at this place.
I all the time used to study piece of writing in news papers but now as I am a user of
web thus from now I am using net for articles, thanks to
web.
I am regular visitor, how are you everybody? This paragraph
posted at this site is in fact good.
Hello my loved one! I want to say that this post is
amazing, great written and come with approximately all significant
infos. I would like to look more posts like this .
I started a healing journey with Dr EHIMARE for 4weeks because I had a chronic infection . He is absolutely the best! He recognizes every ability and modifies for all his patients . I love his page on Instagram and is so informative about health issues. I was at the 3rd week of my healing journey when I decided to go for a test with out him knowing. I was shocked, my dr was also shocked , and tears of joy rolled down from eyes. Because am free from the deadly infection.
CONTACT HE TODAY 👇🏿
https://linktr.ee/doctorehimare
Nicely put, Regards!
You actually mentioned that perfectly.
I started a healing journey with Dr EHIMARE for 4weeks because I had a chronic infection . He is absolutely the best! He recognizes every ability and modifies for all his patients . I love his page on Instagram and is so informative about health issues. I was at the 3rd week of my healing journey when I decided to go for a test with out him knowing. I was shocked, my dr was also shocked , and tears of joy rolled down from eyes. Because am free from the deadly infection.
CONTACT HE TODAY 👇🏿
https://linktr.ee/doctorehimare
I started a healing journey with Dr EHIMARE for 4weeks because I had a chronic infection . He is absolutely the best! He recognizes every ability and modifies for all his patients . I love his page on Instagram and is so informative about health issues. I was at the 3rd week of my healing journey when I decided to go for a test with out him knowing. I was shocked, my dr was also shocked , and tears of joy rolled down from eyes. Because am free from the deadly infection.
CONTACT HE TODAY 👇🏿
https://linktr.ee/doctorehimare
It’s a shame you don’t have a donate button! I’d without a doubt donate
to this brilliant blog! I guess for now i’ll settle for bookmarking and
adding your RSS feed to my Google account. I look forward
to brand new updates and will talk about this website with my Facebook group.
Talk soon!
pro muscle 100 shredded stack
References:
https://torpeedo.org/?p=475
steroid user vs natural
References:
https://www.massimoserra.it/galleries/esterni/img_1754/
May I simply just say what a relief to uncover someone who really understands what they are
discussing online. You certainly know how to bring an issue to light and make it important.
A lot more people should read this and understand this side of
your story. I can’t believe you aren’t more popular because you definitely have the gift.
Hello! I’m very excited to inform everyone that I’m completely cured from my HSV 1&2 recently. I have used Oregano oil, Coconut oil, Acyclovir, Valacyclovir, Famciclovir, and some other products and it’s really helped during my outbreaks but I totally got cured! from my HSV with a strong and active herbal medicine ordered from a powerful herbalist and it completely fought the virus from my nervous system and I was tested negative after 12 days of using the herbal medicine. I’m here to let y’all know that herpes virus has a complete cure, I got rid of mine with the help of Dr Maggi and his herbal exploit. Contact him via email: drmaggiherbalhome@gmail.com call or whatsApp him on +1(917) 979-6387
Yesterday, while I was at work, my cousin stole my apple ipad and tested to see if it can survive a thirty foot
drop, just so she can be a youtube sensation. My iPad is
now broken and she has 83 views. I know this is completely off topic but I
had to share it with someone!
This is really interesting, You’re a very skilled blogger.
I’ve joined your feed and look forward to seeking more of your fantastic post.
Also, I have shared your web site in my
social networks!
Hi there! I just wanted to ask if you ever have any problems with hackers?
My last blog (wordpress) was hacked and I ended
up losing months of hard work due to no backup. Do you have any methods
to stop hackers? https://nogami-nohken.jp/BTDB/利用者:EllaGarvan06
Howdy! I know this is kinda off topic but I was wondering
which blog platform are you using for this site?
I’m getting tired of WordPress because I’ve had issues with hackers
and I’m looking at alternatives for another platform.
I would be great if you could point me in the direction of a good platform.
You really make it seem so easy with your presentation but I find this matter to be actually something
which I think I would never understand. It seems too complex and very broad for me.
I’m looking forward for your next post, I will try to
get the hang of it!
Помимо уборки отдельных
комнат, есть несколько общих правил, которые стоит
соблюдать ежедневно.
Hello! I’m very excited to inform everyone that I’m completely cured from my HSV 1&2 recently. I have used Oregano oil, Coconut oil, Acyclovir, Valacyclovir, Famciclovir, and some other products and it’s really helped during my outbreaks but I totally got cured! from my HSV with a strong and active herbal medicine ordered from a powerful herbalist and it completely fought the virus from my nervous system and I was tested negative after 12 days of using the herbal medicine. I’m here to let y’all know that herpes virus has a complete cure, I got rid of mine with the help of Dr Maggi and his herbal exploit. Contact him via email: drmaggiherbalhome@gmail.com call or whatsApp him on +1(917) 979-6387.
Hello! I’m very excited to inform everyone that I’m completely cured from my HSV 1&2 recently. I have used Oregano oil, Coconut oil, Acyclovir, Valacyclovir, Famciclovir, and some other products and it’s really helped during my outbreaks but I totally got cured! from my HSV with a strong and active herbal medicine ordered from a powerful herbalist and it completely fought the virus from my nervous system and I was tested negative after 12 days of using the herbal medicine. I’m here to let y’all know that herpes virus has a complete cure, I got rid of mine with the help of Dr Maggi and his herbal exploit. Contact him via email: drmaggiherbalhome@gmail.com call or whatsApp him on +1(917) 979-6387.
God bless Dr. Aba for his marvelous work in my life, I was diagnosed of HERPES since 2019 and I was taking my medications, I wasn’t satisfied i needed to get the HERPES out of my system, I searched about some possible cure for HERPES and i saw a comment about Dr. Aba how he cured HERPES, DIABETES, HEPATITIS B and CANCER with his herbal medicine, I contacted him and he guided me. I asked for solutions, he started the remedy for my health, he sent me the herbal medicine through DHL. I took the medicine as prescribed by him and 14days later i was cured from HERPES, Dr. Aba truly you are world greatest herbal doctor, do you need his help also? Why don’t you contact him today through his email address: dr.abaherbalhome@gmail.com and his WhatsApp phone number +2348107155060
I thought the physicians says there is no cure for HSV 2!!! I am telling you today that DR.UMA cure HSV 2 with his herbal medicine and once you get cured you are cured forever it is never reversible, I have been suffering for this deadly disease called HSV 2 for more than 2years and I lost all hope because my doctor says there is no cure for HSV 2. Brethren I saw a testimony on the internet on how DR.UMA cure HSV, Hapatitis etc with his herbal medication and an email and watsapp to contact him was also displayed, I thought this was a joke but I decided to contact him and he replied telling me not to worry that my problem is over . DR.UMA sent me a herbal medication to drink for one month but only 2weeks I feel strange and I went to my doctor and he confirmed me negative. He can help you too. Contact him via email…dr.umaherbalcenter@gmail.com WhatsApp +2347035619585. He is capable of curing AUTISM, HERPES, HPV, HSV1&2, HEPATITIS A B C, and DIABETES.
مولتی ویتامین اپتی من،
یک مولتی ویتامین جامع و قدرتمند است که به طور اختصاصی برای نیازهای تغذیهای آقایان، به ویژه ورزشکاران، طراحی شده است.
Inspiring story there. What happened after? Take care! https://tonybetincanada.wordpress.com/
This site was… how do I say it? Relevant!! Finally
I have found something that helped me. Thanks! https://Playamocasinoinau.wordpress.com/
God bless Dr. Aba for his marvelous work in my life, I was diagnosed of HERPES since 2019 and I was taking my medications, I wasn’t satisfied i needed to get the HERPES out of my system, I searched about some possible cure for HERPES and i saw a comment about Dr. Aba how he cured HERPES, DIABETES, HEPATITIS B and CANCER with his herbal medicine, I contacted him and he guided me. I asked for solutions, he started the remedy for my health, he sent me the herbal medicine through DHL. I took the medicine as prescribed. by him and 14days later i was cured from HERPES, Dr. Aba truly you are world greatest herbal doctor, do you need his help also? Why don’t you contact him today through his email address: dr.abaherbalhome@gmail.com and his WhatsApp phone number +2348107155060.
Hello everyone, I was infected with the HSV 2 virus and I got cured from the HSV 2 virus a few months ago after I contacted Dr Zack Balo, I saw a post on the internet after I have seek healing for several years from different doctors in California. I sent Dr Zack Balo a request for help, just a few emails. I followed his instructions and he sent me the herbal medication after I paid him. Now I am negative and I referred him to my friend who had this same sickness and she is cured too. You can contact him via email: wiseindividualspell@yahoo.com or call/text him on WhatsApp +2348129592997.
Simply wish to say your article is as astonishing.
The clarity on your publish is simply nice and i could suppose you are an expert in this subject.
Well together with your permission allow me
to snatch your RSS feed to stay updated with approaching
post. Thanks 1,000,000 and please keep up the enjoyable
work.
All of our recent reports about prison/jail progress, racial disparities, and extra, re-organized by state. We have a united commitment to serve our diverse group with equity, dignity, and equality. Sheriff Roybal was born and raised in Colorado Springs and is a Palmer High School graduate. El Paso County is house to Sheriff Roybal, and he considers it the respect of his lifetime to serve as the twenty ninth Sheriff of El Paso County. In April of 2010, he was promoted to the rank of sergeant, and had the privilege to serve in varied capacities throughout the Workplace.
Aside from one Fangoria interview in 1990, Curry never publicly acknowledged his involvement in It till an interview with Moviefone in 2015, where he referred to as the role of Pennywise “a wonderful half”. He rose to prominence as Dr. Frank-N-Furter in the musical movie The Rocky Horror Picture Show (1975), reprising the role he had originated within the 1973 London, 1974 L A, and 1975 Broadway musical stage productions of The Rocky Horror Show. Grant Thornton LLP is a licensed impartial CPA firm that provides attest providers to its shoppers, and Grant Thornton Advisors LLC and its subsidiary entities present tax and business consulting providers to their purchasers. Grant Thornton Advisors LLC and its subsidiary entities are not licensed CPA firms. If you consider that a judge has a disability affecting his or her performance or has violated one or more of the Canons of the Code of Judicial Conduct, it is applicable to file a complaint with the CJC. Please describe as specifically as attainable what the choose did or mentioned that causes you to imagine he or she has a disability or has committed misconduct.
Do you might have any questions about our products, rental-purchase options or oil care and fluid care? Is your oil or fluid exceptionally heavily loaded and also you have no idea whether fluid or oil cleanliness may be improved? In 1989, A&M released The Best of Tim Curry on CD and cassette, featuring songs from his albums (including a reside model of “Alan”) and a previously unreleased song, a live cowl model of Bob Dylan’s “Simple Twist of Destiny”. Curry toured North America and some European nations along with his band between 1978 and 1980. In 1990, Curry carried out because the Prosecutor in Roger Waters’ production of The Wall – Reside in Berlin.43 Although Curry’s first album was released in 1978, he had previously recorded a nine-track album for Lou Adler’s Ode Information in 1976. Nevertheless, the album remained unreleased in its entirety until February 2010, when it was made obtainable as a legal obtain entitled …From the Vaults (though 4 tracks from these periods had been released on a 1990 Rocky Horror field set).
Use the “Specific Details” section of the shape to elucidate, in your personal words and with as a lot detail as attainable, the circumstances that led to your grievance and the details and evidence that you simply believe exist to support your criticism. CJC® Depth Filters have a filtration degree of 3 microns absolute and a very massive dirt-holding capability, providing most protection. Here, you’ll discover a profession that provides you extra flexibility, alternative and assist to empower your passions.
The extremely high dust holding capability and filter effectivity make them to a greatest price solution. https://git.koppa.pro/linneabickford® Fine Filters deliver measurable customer advantages, including lower operation and upkeep prices, increased productivity, and maximum lifetime for system parts, in-line filters, and oil. “It was solely with the Desorber that the gear oil could finally be dried satisfactorily. By avoiding the oil change, we have been in a place to save EUR four,890 (EUR 3.26/litre) – an important contribution not only when it comes to budget but also when it comes to resource financial savings. The excellent results convinced us, so we decided to purchase two identical Desorbers for our tug boats, “Bugsier 5” and “Bugsier 6”. Data about wear particles, relative humidity, oil temperature, oxidation rate and filter situation values is crucial for you to avoid abrasive put on, cavitation, corrosion, viscosity changes and loss of lubricating properties?
CJC® Desorber-Filter-Units D10 reduce the water content material in your oil to beneath a hundred ppm inside a very short time. At the identical time, the integrated nice filter minimizes particles and oil ageing merchandise (acids, varnish, sludge). The D10 unit is ideal for hydraulic oils, gear oils and lubricating oils – whether or not based on mineral oil or as an artificial fluid. Even stable emulsions with a water content of as much as 70 % can be dried and processed efficiently.
As a Sergeant, he served as supervisor in the Safety Division, Inner Affairs Investigator, Public Information Officer, Legislative Liaison, and oversaw the Concealed Handgun Program. Sheriff Joseph Roybal began his career with the El Paso County Sheriff’s Office in October 1995. His early assignments throughout the Detention Bureau included serving as a Deputy within the Safety Division, member of the Special Response Staff, and Court Docket and Transport Deputy on the El Paso County Courthouse. Please observe that a judge is not required to recuse himself or herself from a selected matter merely because a party concerned in that matter has filed a complaint with the CJC. If you’ve a disability that forestalls you from submitting a written grievance, please contact the CJC’s workplace to discuss how this office can greatest accommodate your wants. Make certain that you’ve got filled out the complaint type completely and precisely.
Our CJC® Oil Filters are recognised all over the world as being extremely efficient. Summed up, CJC® Nice Filters provide extremely environment friendly offline oil filtration solutions using kidney loop filtration technology that can help prolong oil change intervals, cut back CO₂ emissions, and save on upkeep prices. Depth filter inserts with application-specific filter materials, extraordinarily high filth holding capacities and thus glorious price-performance performance. Situation monitoring methods that provide you with precise oil situation values in real time – anytime, anyplace.
If you want to stay nameless, do not fill within the “Contact Information” part of the form.
By operating within the bypass flow or on a free-standing tank, the Desorber-Filter-Unit D10 ensures steady oil drying and nice filtration, impartial of machine operation. The desorption process works independently of viscosity, additives and air content material in the oil. CJC® Fantastic Filters are offline oil filtration options with built-in circulating pumps for off-line set up. The filters are acknowledged all over the world as highly efficient purification methods for applications involving hydraulic oil, lubrication oil, gear oil, diesel fuel, quenching oil, phosphate esters and extra. By investing in our oil filtration techniques, you will achieve the bottom value per kilo of filth eliminated and important value savings, with both short- and long-term benefits. For example, your in-line oil filters and parts will have longer lifetimes. You will avoid most of the oil-related failures and breakdowns attributable to contaminated oil.
Sermorelin can also be injected into body fats utilizing a small needle. Sermorelin injections are just like those used to inject insulin. If you would possibly be injecting sermorelin your self, rigorously observe the instructions supplied by your physician. For many, sermorelin offers a safer, extra sustainable path to healthy hormone ranges. Your doctor will determine your dosage and size of remedy based in your particular person elements. Kids and youths with below-average development are the primary candidates for sermorelin injections. In this group, sermorelin might help with both analysis and therapy of hGH deficiency.
Long-term protocols often embrace biking to keep away from desensitization and maintain effectiveness. Begin your free on-line assessment at present and get matched with a personalised sermorelin plan. Several private factors affect how much you might want for greatest outcomes. Improper method, injecting too incessantly in the identical space, or using a dull needle may cause redness, swelling, itching, or bruising on the injection web site. While mild irritation is widespread, rotating injection spots and using clear, sharp syringes helps scale back these effects.
At Higher U, we’re dedicated to helping you unlock your well being potential by way of focused, personalized regenerative health therapies. After present process sermorelin remedy, patients normally experience higher energy ranges and improved mood. Within three to six months, patients report enhancements of their physique, together with increased muscle mass, enhanced pores and skin tone, and overall higher health. Development hormone helps physique composition, recovery, and wholesome aging.
Users incessantly report experiencing expedited restoration periods following bodily exertion, together with fortified immune perform. These benefits not solely influence bodily well-being but additionally yield favorable impacts on mental well being. Sermorelin Acetate is a synthetic peptide designed to duplicate the physiological results of the endogenous development hormone-releasing hormone (GHRH). By triggering the pituitary gland to secrete development hormone, Sermorelin Acetate serves as a therapeutic agent with important applications across various medical domains. Its approval by the FDA for the remedy of growth hormone deficiency in both pediatric and adult populations underscores its clinical relevance. How typically — and when — you take sermorelin plays an enormous function in how efficient it is.
As your hormone levels enhance slowly, the changes in your physique additionally occur over time. The gradual improvement is beneficial as a end result of it reduces the chance of overstimulation and helps to ensure long-term, sustainable outcomes. Scientific studies have highlighted the potential advantages of the CJC-1295 Ipamorelin blend for cardiovascular well being, rising endurance, and selling lean muscle mass improvement. The mix works by enhancing production of growth hormone, which performs a crucial position in bettering cardiovascular function, boosting vitality levels, and aiding in muscle restore and progress. This distinctive mix works by concentrating on the body’s metabolic fee, resulting in elevated calorie burn even at relaxation. Peptides like CJC-1295 and Ipamorelin stimulate the release of development hormones, which in flip improve fats breakdown and utilization for vitality production. For more information, check out the simplifying peptide therapy.
It can boost insulin-like progress issue 1 (IGF-1) production within the body through stimulation of the pituitary gland. Human development hormone (HGH) plays an necessary role in our growth from start to maturity. While Ipamorelin is considered to have a comparatively favorable safety profile compared to other peptides, a quantity of necessary considerations ought to guide its use in bodybuilding contexts. With a brief half-life of about 2 hours, Ipamorelin requires multiple daily doses for finest results in bodybuilding. At All Times use Ipamorelin underneath medical supervision of a healthcare skilled, as responses vary from individual to individual. Common monitoring and follow-up are essential to adjust the dosage for optimum outcomes and to reduce unwanted effects.
Its capacity to assist in fat reduction renders it an interesting choice for individuals seeking to refine their body composition. Sufferers who have utilized Ipamorelin have reported favorable outcomes, together with enhanced muscle definition, faster recovery durations, and improved general well being and wellness. Analysis signifies that individuals utilizing the Sermorelin Ipamorelin blend observe a major enhance in muscle mass and power. Notably, a examine printed in the Journal of Endocrinology demonstrated that topics supplementing with these peptides exhibited elevated ranges of IGF-1, a critical marker of muscle growth potential. This synergistic effect is especially advantageous in HGH therapy as Sermorelin and Ipamorelin collaborate to stimulate the manufacturing and release of HGH from the pituitary gland. While Sermorelin triggers the release of progress hormone, Ipamorelin complements this course of by amplifying the growth hormone-releasing hormone sign to the pituitary gland.
Sermorelin remedy is a promising answer for bettering symptoms of GH decline. Sermorelin can complement TRT when there is age associated hormone decline and progress hormone deficiency signs. The mixture can help muscle growth, fats loss, and temper stability when labs and symptoms assist therapy. Ipamorelin excels at constructing lean muscle with minimal unwanted facet effects. Sermorelin shines for fats loss, sleep quality, and anti-aging benefits. Utilizing them collectively creates the ultimate word progress hormone protocol for bodybuilders.
Claims of dramatic fat loss, massive muscle positive aspects, or superior sleep from ipamorelin alone usually are not borne out by high-quality trials. For kids or adults with diagnosed GH deficiency, standard-of-care therapies—not secretagogues—govern remedy. And for weight loss, ghrelin agonism can increase urge for food, which may counter goals. From Dr. Camp’s perspective, the utilization of Sermorelin Acetate and Ipamorelin represents a notable development in growth hormone remedy, offering a safer and extra natural method for hormone alternative.
References:
https://git.anacsoft.com/mickey63q5884
In adults, having inadequate development hormones can result in despair, poor focus, and anxiety. It can even take its toll on your pores and skin and total health, making it feel like you would possibly be growing older faster. On the other hand, Sermorelin is usually preferred for these in search of a milder choice that also aids in total vitality and anti-aging advantages with out important spikes in development hormone levels. In terms of Ipamorelin, it is recognized for its ability to stimulate the pituitary gland to launch Development Hormone (GH), enhancing protein synthesis, selling muscle growth, and aiding in fat loss. Sermorelin is an artificial form of growth hormone-releasing hormone (GHRH), used to raise ranges of human growth hormone (hGH).
Many users first notice a small drop in physique fat and a tighter waist. Modifications in body composition speed up when training and food regimen are consistent. A calorie deficit and better protein consumption help the body use the expansion hormone signal. In Distinction To human progress hormone (HGH), which immediately will increase GH levels through exogenous injection, Sermorelin works upstream, prompting your physique to produce more of its own GH in a regulated, physiological means. This mechanism helps minimize risks of GH abuse like insulin resistance, acromegaly, or organ progress.
Before diving into the variations between Ipamorelin and Sermorelin, it helps to know peptides. They are naturally occurring and hold the building blocks for protein creation. Insert the needle at a 45-degree angle into the subcutaneous tissue and slowly depress the plunger to ship the dosage. After administering the peptide, gently withdraw the needle, apply pressure to the injection site if wanted, and eliminate the used needle correctly in a sharps container. Sermorelin provides varied benefits, corresponding to increasing IGF-1 ranges and enhancing bone mineral content material, contributing to general health and well-being.
That shift can assist fats loss, lean muscle mass, skin health, bone density, and sleep quality over time. On the opposite hand https://www.appleradish.org/desmonddyke737 offers a extra wise choice for patients who desire a gradual, sustained method to progress hormone remedy. Sermorelin copies the natural way your physique releases growth hormone plus creates a steady enhance in growth hormone levels. A lot of individuals choose this technique after they want lasting well being benefits. The therapy leads to larger energy ranges along with faster restoration instances in addition to improved sleep subsequent to better pores and skin elasticity. The steady action of Sermorelin helps sufferers keep away from sudden adjustments in their system, which really results in extra balanced results as time passes.
Ipamorelin features by activating the release of development hormone and stimulating the body’s natural mechanisms to extend collagen synthesis, thereby enhancing skin elasticity and reducing wrinkles. Ipamorelin is part of a category of peptides designed to mimic the pure progress hormone-releasing properties within the physique. Via its interaction with specific receptors in the pituitary gland, Ipamorelin prompts the discharge of growth hormone, resulting in increased levels of this important hormone. Sermorelin/Ipamorelin is injected subcutaneously (under the skin). The beneficial schedule of dosing is at evening to mimic the consequences of pure development hormone release. It is greatest to take it at least one hour after eating dinner, so meals does not intrude with the release of progress hormone and IGF-1. Dosing protocol unless in any other case specified by your doctor is 0.2 ml sub-Q (300mcg) at bedtime 5 nights every week.
This means, the meals you’ve eaten doesn’t interfere with the release of HGH. Many folks choose to do Testosterone Alternative Therapy (TRT) alongside Peptide Therapy. TRT is primarily used to treat low testosterone ranges, which might happen with age or as a outcome of a medical situation.It’s possible to mix both therapies to boost the results even additional. Sufferers who opt for Peptide Remedy only often tend to take action because they don’t qualify for TRT through their insurance coverage. Ready to begin your journey toward higher hormone ranges with Sermorelin or Ipamorelin?
The actual amount of drugs needed has been rigorously labored out. Using an excessive amount of will increase the chance of unwanted effects, whereas utilizing too little might not enhance the condition. Although sure medicines shouldn’t be used collectively at all, in other circumstances two different medicines may be used collectively even when an interaction might occur. In these circumstances, your doctor could need to change the dose, or different precautions could also be needed. Inform your healthcare professional in case you are taking another prescription or nonprescription (over-the-counter OTC) medicine. There are not any adequate research in women for determining infant threat when utilizing this medication throughout breastfeeding. Weigh the potential advantages against the potential dangers before taking this treatment whereas breastfeeding.
Finding the best supplier to lead you to success has by no means been more necessary. Collectively, you and your provider will create a plan that can assist you meet your well being, wellness and performance goals. With guidance from our healthcare consultants and the convenience of at-home administration, you probably can safely and successfully combine sermorelin into your routine. Let’s discover the potential unwanted facet effects of both sublingual and injectable sermorelin, focusing on the extra common reactions and those which are less regularly experienced.
Sermorelin stimulates the pituitary gland to release pure progress hormone by mimicking the perform of GHRH, resulting in advantages like improved recovery, fat loss, and anti-aging results. Both peptides help to boost growth hormone levels but act in another way. Ipamorelin directly triggers production in addition to Sermorelin aligns with body’s natural manufacturing of human development hormone to achieve extra balanced outcomes. For individuals with an emphasis on constructing lean muscle mass and selling muscle recovery, Ipamorelin may be an acceptable alternative due to its capacity to stimulate development hormone ranges extra consistently. Ipamorelin is classed as a progress hormone releasing peptide (GHRP) that simulates the effects of ghrelin by inducing the release of development hormone from the pituitary gland.
Definitely believe that which you said. Your favorite reason seemed to be on the web the easiest thing to be aware of.
I say to you, I certainly get annoyed while people think about worries that
they just don’t know about. You managed to hit the nail upon the top and defined out the whole thing without having side-effects , people could
take a signal. Will likely be back to get more.
Thanks
These results usually resolve with out intervention and could be minimized with proper injection approach. While particular person outcomes may differ, many customers report noticeable adjustments within just a few months, with continued benefits over time. The FDA has not reviewed, evaluated nor permitted the compounded preparations to diagnose, remedy or forestall illness. Each effort has been made to supply correct and complete information.
Ipamorelin functions by activating the discharge of progress hormone and stimulating the body’s natural mechanisms to extend collagen synthesis, thereby improving skin elasticity and lowering wrinkles. Ipamorelin offers a range of benefits, including increased collagen production, enhanced lean muscle mass, and effective anti-aging properties. Ipamorelin is a half of a class of peptides designed to mimic the pure development hormone-releasing properties within the body. Through its interplay with particular receptors in the pituitary gland, Ipamorelin prompts the release of progress hormone, leading to elevated ranges of this significant hormone. One of the most important advantages of Ipamorelin is its ability to assist regulate appetite.
It is extensively favored among athletes and health enthusiasts aiming to optimize their physical efficiency and body composition. Studies point out that Ipamorelin can expedite muscle progress by encouraging the release of progress hormone, thereby enhancing protein synthesis and muscle mending. Its capacity to help in fats discount renders it an interesting alternative for individuals in search of to refine their physique composition. Sufferers who’ve utilized Ipamorelin have reported favorable results, together with enhanced muscle definition, quicker restoration intervals, and improved general health and wellness. As Soon As once more, the research are in males taking progress hormone, not women taking Sermorelin.
Male hypogonadism is an increasingly prevalent clinical condition that affects patients’ quality of life and total health. Obesity and metabolic syndrome can both cause and outcome from hypogonadism. Though testosterone stays the gold normal for hypogonadism management, its advantages aren’t at all times conserved across completely different populations, particularly with regards to adjustments in body composition. The GHS that will be mentioned embrace sermorelin, development hormone-releasing peptides (GHRP)-2, GHRP-6, ibutamoren, and ipamorelin.
Fast forwarding to about the 3 month mark, I’ve actually began to note the advantages really being highlighted. I’m capable of lift means more durable and longer, my recovery from lifting has drastically elevated, I’m hardly ever sore and I’m PR’ing in the health club by the week now. https://git.fandiyuan.com/dallas92f19392 is acknowledged for their efficiency as peptides that will potentially enhance sleep. Similarly to Sermorelin, unwanted facet effects are unusual and usually quick in duration.
That said, beginners ought to be aware of potential unwanted aspect effects and tips on how to handle them. Not Like anabolic steroids or full-length development hormone, sermorelin works by mimicking GHRH 1–29, the lively section of the hormone that triggers GH release from the pituitary gland. It’s particularly useful for those with declining GH ranges due to age, stress, or overtraining, and it can be stacked with different peptides like Ipamorelin or BPC‑157 to optimize restoration and results.
In reality, federal regulations prohibit the dishing out of progress hormone for anti-aging or body-building functions. Utilizing sermorelin without a true medical need won’t flip again the clock; however it could pose dangers, like disrupting your hormone balance or inflicting side effects unnecessarily. As A End Result Of it’s designed to emulate the pure cycle of HGH production, it has been discovered to be notably efficient in treating “adult-onset” or “age-related” progress hormone deficiency. When compared to traditional progress hormone replacement remedy, sermorelin could be inexpensive and has comparatively minor unwanted effects.
These receptors are designed to reply to progress hormone-releasing hormone (GHRH), which Sermorelin mimics. Notably, most unfavorable reactions (if any) happen instantly and are due to pores and skin irritation or allergic reactions on the injection website. These can embrace pain, redness, or swelling on the web site or sometimes a rash or hives. Sermorelin, ipamorelin, and vitamin B are all related therapies that may elevate the body up to par when it struggles to naturally keep up.
An impressive attribute of this drug is its propensity to focus on belly and visceral fats. These sections have gained notoriety for being significantly stubborn to lose, no matter food plan and exercise routines. By growing metabolic fee, it assists in burning these stubborn fats reserves, while simultaneously promoting lean muscle mass. One vital advantage is that it presents maturity in muscle improvement without the identical old water retention seen with different anabolic steroids. This attribute leads to onerous, dense muscular tissues, not just inflated mass. Thus, the features from this drug are usually more sustainable, even after discontinuing its use.
Due to a rise in exogenous testosterone, ladies can become hornier on Anavar, with an elevated want for sex. Many women who’re pondering of taking steroids are afraid of their bodies changing, eventually looking like a man. This is called virilization – when a woman begins to develop manly features. Even if a lady did experience such symptoms, they would be reversed after they got here off Anavar. Nonetheless, this doesn’t apply to the voice; which is a everlasting effect (5).
By No Means had a difficulty recovering, however PCT has at all times been the most effective and leaves me much less depressed (as a depressive / anxious person). I’d even recommend to half this dose if sensitive and im certain after 6-8 weeks you may be fine. Certain steroids, significantly those with mineralocorticoid effects, could cause water retention and bloating. If you are taking a cutting stack, you will, hopefully, end up with a leaner face. There are 5 primary ways in which steroids have an result on the face, none of which are particularly flattering.
The Anavar regimen presents a valuable alternative for individuals seeking optimal leads to their health journey. By understanding the mechanics of Oxandrolone, its benefits, and proper usage, individuals can harness its potential for lean muscle gains, elevated strength, and improved endurance. However, it is essential to stick to really helpful dosages and cycle durations while considering pre-cycle preparations and post-cycle remedy for a protected and effective experience.
Thus, some folks may experience vital hair loss from a low dose of Anavar. While others could expertise no hair loss whereas taking high doses of trenbolone. In a nutshell, https://seferpanim.com/read-blog/32903_before-and-after-wonders-a-in-depth-take-a-look-at-anavar-cycle-for-trt.html, a chopping or weight reduction help, is a potent, enticing choice with its challenges and hurdles. Effectiveness closely leans on the user’s committed and disciplined lifestyle changes, addressing the need for sensible utilization and at all times placing well being on the forefront.
Earlier we touched on the subject of Anavar for girls and how actually helpful this drug could be to the fairer intercourse. It’s additionally price including that women who are competitive bodybuilders or health rivals will truly appreciate utilizing var within the offseason. The typical Anavar cycle for ladies consists of starting at 5mg-10mg (depending upon experience), then increasing/decreasing your Anavar dosage as wanted.
Enter your email to unlock 15% off your first order, plus entry to bodybuilding tips, product guides, and unique presents. Many girls share their “Anavar before and after 1 month female” tales on social media and forums like Reddit, where yow will discover useful insights from the community. Whereas individual outcomes could vary, these accounts provide an encouraging have a look at what’s potential.
It’s advisable to begin out with a smaller dosage, notably for novices, to evaluate the body’s reaction to the steroid. Whereas navigating the trail of health transformation with Oxandrolone, the timelines for short-term and long-term outcomes should be properly understood. The early stages may not present eye-catching outcomes but, with time, the shifts turn into extra pronounced, resulting in evident outcomes by the tip of a cycle. Understand that Oxandrolone isn’t a magical solution, however quite a catalyst that enhances the onerous work you place in. People utilizing Oxandrolone ought to prepare for a steady voyage in the direction of their fitness targets, respecting the need for dedication and commitment.
When it involves muscle enhancers, two popular options are Anadrol and Dianabol. Each steroids have their pros and cons, offering totally different benefits and unwanted effects. Understanding the necessary thing differences between Anadrol and Dianabol is crucial for anybody trying to make an knowledgeable alternative of their muscle-building journey. So, let’s delve into the major points of those two muscle enhancers and allow you to resolve which one fits your fitness objectives finest. If you’re contemplating embarking by yourself Anavar journey, it’s important to consult with a healthcare skilled or health professional who can guide you through the process.
Many professional and novice bodybuilders appreciated Anavar for its capacity to increase muscle hardness and density without compromising their femininity. Anavar, a widely recognized anabolic steroid, has gained important reputation amongst athletes and bodybuilders because of its remarkable impression on power positive aspects. Solo cycles of Anavar have been recognized to unveil the true energy of this compound, permitting users to witness spectacular transformations both when it comes to physique and efficiency. Anavar cycles usually range between 6 to 8 weeks, guaranteeing that your body receives sufficient time to adapt and reply to the compound. Throughout this time, customers usually expertise elevated power levels, enhanced muscle pumps, and improved muscle definition.
In this study, Vasoactive Intestinal Polypeptide Plays a Key Role within the Microbial-Neuroimmune Management of Intestinal Motility – ScienceDirect, they confirmed it can treat each IBS-C and IBS-D. Nevertheless, for people who need to foster a Th2 response, it can be tough to find treatments and VIP is an option. VIP promotes the development of Th2 cells and inhibits Th1 differentiation. See the “No Cap” section above for a more element on how they’re a extra in-depth match to our own pure peptides and have improved bioavaiability. Additionally intriguing is its potential to support total wellness and the immune system. • A benefit of sprays is delivery of the peptides very near the mind.
For experiments, cells have been transferred into 6 or 12-well Costar tradition plates (Corning, Ny, USA) and grown to within 90% confluence. Cells have been transfected utilizing Lipofectamine 2000 (Invitrogen, Paisley, UK) in accordance with the manufacturer’s directions. All information and content material offered are for instructional and informational purposes solely. The U.S. Meals and Drug Administration (FDA) has not evaluated this compound, and it’s not approved to diagnose, treat, remedy, or forestall any medical situation. Get science-backed methods to gasoline your body, sharpen your thoughts, and assist long-term health, delivered to your inbox every Monday. While the FDA has banned compounding pharmacies from making sure peptides, there are other pharmacies—dubbed ‘unregulated pharmacies’—that aren’t regulated by the government. These pharmacies may still manufacture banned peptides—but be cautious of quality and safety if you are intent on going this route.
As Quickly As it’s there, it competes for house with a half of NF-κB (called p65RelA). This is essential as a end result of IκBα holds NF-κB in place and stops it from causing damage. In this article, we’ll uncover what KPV is, the way it works in your body, its real advantages, possible side effects, and the best place to purchase it for research use. Pharmaceutical versions don’t exist for consumers – all present products are research-grade. These reactions are linked to the injection technique itself, not the peptide’s inner effects. Even although oral, intravenous, subcutaneous, and transdermal administration by licensed professionals is secure, it isn’t approved by FDA as of yet.
By concentrating on PepT1, the KPV Peptide aids within the maintenance of mucosal integrity and enhances total barrier safety in opposition to dangerous pathogens and toxins. This targeted approach not solely accelerates mucosal restore but also contributes to the regulation of inflammatory pathways, ultimately facilitating the wound regeneration process. Furthermore, the power of KPV Peptide to modulate immune responses within the gastrointestinal tract provides to its value in treating numerous gastrointestinal illnesses. The sophisticated supply systems of KPV Peptide ensure exact and effective dosing, thereby minimizing potential unwanted effects and optimizing therapeutic results. As a peptide with multifaceted benefits, KPV considerably inhibited not solely accelerates the healing of superficial wounds but also exhibits promise in treating advanced wounds that are often difficult to handle. Its mechanism of action contains promoting the migration of keratinocytes and fibroblasts, important for rebuilding the skin barrier. Clinicians are increasingly exploring KPV’s potential in combination therapies and wound care formulations to optimize treatment outcomes and enhance affected person recovery.
When paired with KPV, you’re addressing irritation from two instructions. KPV helps on the anti-inflammatory aspect, whereas guttides present extra backing for the intestine surroundings itself. That combination can make day-to-day digestion less of a battle and leave you feeling steadier general. The expression of pro-inflammatory cytokines is thought to be involved in intestinal irritation. As anticipated, real-time RT-PCR experiments showed that DSS treatment increased mRNA ranges of varied pro-inflammatory cytokines (IL-6, IL-12, IFN-γ, IL-1β) in mouse colon (Figure 7). Interestingly, KPV therapy decreased the expression of these cytokines and this impact was vital for IL-6 and IL-12 (Figure 7A, B).
Distribution of IκBα in cells handled with or with out histidine tagged-KPV in HBE cells in the presence of 10ng.ml-1 TNFα for 3h. IκBα was visualised with anti-rabbit IgG-TRITC and H6KPV with anti-histidine IgG-FITC. Cellular distribution of histidine tagged KPV, p65RelA, IκBα and MC3R was noticed in methanol-fixed HBE with secondary fluorescent detection as indicated in the determine legends. MC3R expression in mouse lung was decided in paraformaldehyde mounted tissue counterstained with DAPI as described beforehand 19. Fluorescent photographs were obtained utilizing a Zeiss LSM-510 confocal microscope. https://actsolution.iptime.org:3000/juanburing6876 for sale at favorable costs is on the market on the web site of the net store Dinespower. You can see the range and select medicine in accordance with the required dosage and different options.
These dosage varieties are non-invasive and allow for an easier dosing schedule. KPV is a tripeptide, a sequence of three amino acids—Lysine (K), Proline (P), and Valine (V)—is not just one other addition to the vast array of peptides. Let’s delve into the scientific intricacies and practical benefits of KPV, shedding gentle on how this exceptional peptide could be harnessed for health optimization. As the lively element of α-MSH, KPV acts immediately on inflammatory signalling molecules inside cells, reducing the synthesis of pro-inflammatory cytokines and in the end restoring the body to homeostasis. The immune system, which is consistently scanning for trouble, sometimes will get carried away. This peptide appears to deliver stability, making sure the immune response is regular with out tipping over.
KPV gutpeptide, intestine peptides complement, and sytrinol are not meant to replace a balanced food regimen, enough sleep, or day by day movement. They are tools, and they work finest when paired with healthy habits you already know make a difference. This data, including but not restricted to texts, photographs, graphics, labels, components, indications, potential advantages, and different materials contained on this website are for informational purposes solely. No part of this web site is intended to be an different alternative to skilled medical recommendation, therapy, or diagnosis. Always seek the recommendation of your doctor or other professional healthcare provider, significantly before starting a new regimen for the first time. Since the immune system plays a vital position in IBD and is in close contact with IEC, we investigated the anti-inflammatory impact of KPV within the human T cell line Jurkat. Cells had been stimulated with tumor necrosis factor-α (TNF-α) within the presence or absence of KPV and IκB-α degradation was assessed by immunoblot.
Learn which peptides can help you repair and restore Mold Illness, Toxicity and Persistent Inflammatory Response Syndrome. The presence of the copper complex requires further issues for storage container compatibility and prevention of metal ion interactions. Nonetheless, we are assured that you’ll discover immense worth within the Peptide Dosing Cheat Sheet.
What i don’t realize is in reality how you’re no longer really a lot more smartly-favored than you might
be now. You’re very intelligent. You recognize thus significantly in relation to this topic, made me in my opinion believe it from
a lot of various angles. Its like women and men are not fascinated unless it’s
one thing to accomplish with Woman gaga! Your individual stuffs nice.
At all times deal with it up!
Клининговые услуги в Санкт-Петербурге: качественное удаление загрязнений с ковров и мягкой мебели с новым оборудованием и скидками на сайте!Услуги клининга в Санкт-Петербурге
Не ждите, пока грязь и хаос станут проблемой. Подарите нам шанс возродить вашему пространству чистоту и порядок! Узнайте всё о наших услугах и оставьте заявку на сайте : https://uborka-top24.ru
best legal supplement for muscle growth
References:
https://git.bpcspace.com/deliladalziel
Magnesium L-Threonate has been gaining important consideration on the planet of cognitive health and brain function. This unique form of magnesium supplement guarantees to enhance reminiscence, studying, and general brain performance. But what is the truth behind these claims? In this article, we delve into the science and details surrounding Magnesium L-Threonate and its potential results on cognitive perform. What is Magnesium L-Threonate? Magnesium L-Threonate is a compound formed by combining magnesium with L-threonic acid, a metabolite of vitamin C. This combination is specially designed to improve the absorption of magnesium into the brain extra effectively than different types of magnesium supplements. Unlike conventional magnesium supplements that mainly profit muscles and bones, Magnesium L-Threonate has shown promise in crossing the blood-mind barrier, permitting it to instantly affect neural exercise. How Does Magnesium Affect Brain Function? Magnesium is a vital mineral concerned in a whole lot of biochemical reactions throughout the body, together with those important for nerve transmission https://gitea.morawietz.dev/rubymotsinger1 neuromuscular conduction.
Oh my goodness! Impressive article dude! Thanks, However I am having difficulties with your RSS.
I don’t know why I can’t join it. Is there anyone else having the same RSS issues?
Anybody who knows the solution can you kindly respond?
Thanx!!
hi!,I like your writing very a lot! proportion we keep in touch more about
your article on AOL? I need a specialist in this area to resolve my problem.
May be that’s you! Looking ahead to look you.
I already gave up on ever getting cured of HSV2 because i have try many treatment none of them work out for me i have gone to different hospital they always tell me the same thing there is no cure for herpes, when i came across a post about Dr UMA in the net from a lady called Angela i contacted her and she reassured me with his herbal medicine which i took according to the way he instructed, that how i was cured. I doubted at first because i have been to a whole lot of reputable doctors, tried a lot of medicines but none was able to cure me. so i decided to listen to him and he commenced treatment, and under. two weeks i was totally free from Herpes. i want to say a very big thank you to DR UMA for what he has done in my life. feel free to leave him a message on email dr.umaherbalcenter@gmail.com or also Whats-app him +2347035619585.. he also cure all this 1.HIV 2.HIV HPV 3 .ALS 4. BED WETTING DIABETES.,
Hi there, just became aware of your blog through Google, and found that
it’s really informative. I’m gonna watch out for brussels.
I will be grateful if you continue this in future.
Lots of people will be benefited from your writing.
Cheers!
Thanks to God that now everything is fine, I’m cured now from herpes virus by Dr.Aba herbal meds I’m very thankful to him, you contact him through his address on dr.abaherbalhome@gmail.com or whatsapp his mobile number on +2348107155060
I am amazed by Dr Aba herbal remedy. I Have had herpes for over 6 years with frequent outbreaks. Sometimes average 2-3 times per month. Before one breakout could end, the next would begin. Nothing has helped me. I came online in search for a possible way to see how I can fight this virus so I found Dr Aba here online after seeing a lot of testimonies of how he cured herpes and other diseases with natural herbs so I decided to give it a try, I only took his remedy for two weeks and I was completely cured. I recommend Dr Aba remedy to anyone suffering from herpes that wants to be completely cured too. email: dr.abaherbalhome@gamil.com and for quick response Message him on his whatsapp number +2348107155060
Quality posts is the main to invite the viewers to pay a quick visit
the website, that’s what this web page is providing.
Hi! Quick question that’s totally off topic. Do you know how to make
your site mobile friendly? My blog looks weird when browsing from my iphone.
I’m trying to find a template or plugin that
might be able to fix this issue. If you have any suggestions,
please share. Appreciate it!
Hi to all, for the reason that I am genuinely eager of reading this website’s post to be updated daily.
It consists of nice data.
Its a great pleasure for me to write this testimony about how i got my Genital Herpes cured a month ago. i have been reading so many comments of some people who were cured from various diseases by Dr Aba but i never believed them. I was hurt and depressed so I was too curious and wanted to try DR. Aba then i contacted him through his email, he assured me 100% that he will heal me, i pleaded with him to help me out. My experience with him was great, he healed me just as he promised. he sent me his medication and ask me to go for a medical check up after two weeks of usage. i agreed with him i took this medication and went for a check up, to my greatest surprise my result was negative, i am really happy that i am cured and healthy again. I have waited for 3weeks to be very sure i was completely healed before writing this testimony. I did another blood test one week ago and it was still Herpes negative. so i guess its time i recommend anyone going through the same way. reach him through his email address: dr.abaherbalhome@gmail.com OR call, add him on Whatsapp +2348107155060.
Battling with any health related issues or infection is not the end of your life, why not contact a herbal practitioner for cure dr Maggi has herbal remedies and permanent solution for all your health related problems. I recommend him to you today only because i have also used his herbal medicine and it worked perfectly on my health problem, you can actually save yourself from giving your hard earned money to Scammers if only you can contact dr Maggi today for genuine and Permanent cure herbal products . Pls help share this post to save yourself and your loved ones. Dr Maggi specializes in these areas, Permanent herbal supplements for anxiety and depression, HIV/AIDS, Diabetes, Epilepsy, Blood, Cancer, HPV, ALS, herpes etc. Email: drmaggiherbalhome@gmail.com also call or whatsApp him on +19179796387.
HOW I GOT CURED FROM HERPES: I already gave up on ever getting cured of herpes because I have tried many treatment and none has work, I have gone to different hospitals they always recommend me same drugs and it not working on me, until I came across a post about DR ABA on the net from a lady who is recommending people, then i contacted him that day, and he started giving me hope and then prepared some herbal medicine which I took according to his prescription on them, so I was still doubting if it was working on me so at a time my Husband just ask me to go for check up and I did, so I found out that I was cure and free from the herpes virus, thanks to DR ABA once again. his email address is dr.abaherbalhome@gmail.com or WhatsApp him on +2348107155060
This paragraph offers clear idea in favor of the new
viewers of blogging, that truly how to do blogging and site-building.
AN AMAZING REMEDY FOR HSV 1 & 2. It’s so unbelievable how wonderful herbs can be. when I first saw a post that said that a man have a perfect cure for HSV 1&2, i was like could this be real or some kind of scam but due to my eagerness to be cured I took the risk of contacting him, he gave me reasons to believe he is a real herbalist so I followed all his instructions on how to take the drugs for 14 days and now all my test results shows HSV 1&2 (-) negative , Dr Aba have the most safe cure for herpes and other stubborn virus which are HSV 1&2,STI,STD just name it he has the cure for them all. Contact him via his personal email address which is dr.abaherbalhome@gmail.com . Trust me you will like this method, it’s safe, cheap and easy. Do well to let others know about this.
is it legal to order steroids online
References:
http://lovewiki.faith/index.php?title=thompsonbille1728
risk of using anabolic steroids
References:
https://luvwing.com/@yavjulio222385
dangerous drugs that build muscle
References:
https://huntapp.in/employer/growth-hormone-secretagogues-showdown-sermorelin-vs-ipamorelin-explained/
It’s amazing in support of me to have a site, which is helpful designed for my knowledge.
thanks admin
پروتئین کازئین چیست،
کازئین
نوعی پروتئین از گروه فسفو
پروتئینهاست که به طور طبیعی در شیر پستانداران وجود دارد.
aas steroids for sale
References:
https://khmerhd.tv/@wadebolick7413?page=about
I’m very excited to inform everyone that I’m completely cured from HSV1&2 recently. I have used Oregano oil, Coconut oil, Acyclovir, Valacyclovir, Famciclovir, and some other products and it’s really help during my outbreaks but I totally got cured from HSV1&2 with a strong and active herbal medicine ordered from a powerful herbalist called Dr Aba and it completely fought the virus away my nervous system and I tested negative after 14 days of using the herbal medicine. I’m here to let everyone know that herpes virus has a complete cure, I got rid of mine with the help of Dr Aba and his herbal exploit. Contact him via email: dr.abaherbalhome@gmail.com or WhatsApp him at +2348107155060
Am really grateful and thankful for what Dr Aba has done for me and my family. I Was having HERPES for good three years with no solution, the diseases almost took my life and because I was unable to work and I was also loosing lots of money .for medication, but one faithful day when I went online, I met lots of testimonies about this great man so I decided to give it a try and to God be the glory he did it. he cured me of my diseases and am so happy and so pleased to Write about him today. if you need his help or you also want to get cured just the way I got mine, just email him below Dr.abaherbalherbalhome@gmail.com or Whatsapp :+2348107155060
Does your website have a contact page? I’m having
a tough time locating it but, I’d like to shoot you an e-mail.
I’ve got some ideas for your blog you might be interested in hearing.
Either way, great blog and I look forward to seeing it expand over time.
how to get a prescription for steroids
References:
https://apunto.it/user/profile/245750
anabolic steroids medical uses
References:
https://www.google.co.ck/url?q=https://urlscan.io/result/0199b045-1b3d-7476-824a-91417d691d04/
I am excited to share this testimony, I was 3 years ago diagnosed of Herpes virus . My medical condition was heart broken because it was causing me so many our brakes, I was subjected to different medications by my medical doctor just to control the ourbrakes. Despite my visit to several doctors my health wasn’t getting better, all they could say is for me to stay on the treatment. At the verge of giving up, I went to the internet to search for a treatment on my own at least. But I found a cure instead. In the internet, I read a testimony of a lady who had herpes. She shared an e-mail address of the Doctor. Luckily everything seemed to be okay after I took the Herbal Medicine. I wish I could say that’s the end of it because I haven’t had any symptoms since then. Do not expose yourself to more danger, use a herbal remedy that is safe and effective. If interested contact him via email address dr.abaherbalhome@gmail.com. or call +2348107155060
ข้อมูลชุดนี้ มีประโยชน์มาก ค่ะ.
ผม ไปเจอรายละเอียดของ ข้อมูลเพิ่มเติม
ที่คุณสามารถดูได้ที่ Teri.
น่าจะถูกใจใครหลายคน
มีการยกตัวอย่างที่เข้าใจง่าย.
ขอบคุณที่แชร์ บทความคุณภาพ นี้
จะรอติดตามเนื้อหาใหม่ๆ ต่อไป.
You would possibly struggle to focus or really feel confused, like your mind is wrapped in a fog. Edible frankincense may be purchased from specialty well being food stores, natural retailers, and on-line retailers that focus on pure products. However, natural sugars typically occur in foods that present other useful nutrients. However, specialists believe that different helpful nutrients in seafood could contribute to the well being advantages of consuming fish oil. Own your health with a personalised, full well being plan. It’s greatest to talk along with your doctor about your risk factors to verify you’ve gotten the appropriate remedy plan in place. Always consult a physician earlier than making any medical choices. Most models require a watch-fashion or medical battery, however consider getting a mannequin that makes use of AAA batteries, which is perhaps simpler to replace. Lactic acidosis is a medical emergency. You take any such insulin initially of every meal. But to ensure probably the most accurate readings and to reap the benefits of the most recent applied sciences, you may need to substitute them every 3 to 5 years. Free Printable Blood Sugar Charts – Web need to keep track of your blood glucose readings to help you better manage your condition?
Feel free to surf to my homepage; http://rm.runfox.com/gitlab/clarencesegal0
!%%BuyBlackhat-SEO-Hidden-LinkTelegram @buycasinolink
Ви заслуговуєте руху без болю — і ми допоможемо це повернути.
Ми — команда експертів
з реабілітації, яка працює з дітьми і дорослими після інсульту, травм,
операцій, при ДЦП, сколіозі, болях
у спині та суглобах.
Ми комбінуємо найкращі методики світу для стійкого відновлення.
Ми пропонуємо затишок, сучасне обладнання і людяне ставлення.
Відновлюємо рух і впевненість, щоб ви жили без обмежень.
Fizio.ua — центр, де здоров’я і рух на першому місці.
Зробіть крок до руху і впевненості — запишіться просто зараз.
With joy in my heart and gratitude to God almighty i have come to tell the general public that Lord Vasikar herbal medicine is the best remedy for Herpes and HIV/AIDS, I was a carrier of Herpes virus and I saw a testimony on how Lord Vasikar cure Herpes, I decided to have a contact with him and asked him for help and he started the remedies for my health and prepare the herbal medicine for me which i use to cure myself. Thank God, now everything is fine, I’m cured by Lord Vasikar herbal medicine, I’m very thankful to Lord Vasikar and i will not stop publishing his name on the internet because of the good work he did for me, You can reach him on his email: homeofnaturalremedietheresamtobie@gmail.com .com And WhatsApp Number +44 7494 422098.
LORD VASIKAR CAN AS WELL CURE THE FOLLOWING DISEASE:-
1. HIV/AIDS
2. HERPES
3. CANCER OF ALL KINDS
4. HSV
5. Hepatitis A,B,C
6. Diabetes
7. CHRONIC DISEASE
8. C.O.P.D
9.ALS
Natural remedy for curing HERPES and HIV. WhatsApp Lord Vasikar on +44 7494 422098.
①With a set of built-in NDEF protocol normal for prime-pace NFC chips, it`s in a position to attach a smartphone to complete perform performing and information sharing, that approach many playful and convenient function will probably be accessible. ②With a set of constructed-in 13.56MHz excessive-frequency IC chips, it can be utilized to repeat a lot of the non-contact IC playing cards resembling entry card, elevator card, parking card, membership card, consumption card, and so forth.. ③With a set of constructed-in 125KHZ low-frequency ID chips, It can be used to copy all non-contact ID playing cards of the identical frequency into the various card above, too. ④In the inside facet of the ring metallic ring embryo, there are 3 merchandise that good for your health: FIR far-infrared vitality stone (pink), Rare steel germanium grain (shiny steel shade) and Prime quality volcanic mineral magnetite (dark steel color) , which make the http://152.136.163.38:3000/stanley5621923 have many health results to make your body can restore steadiness and coordination. 2.Designed with IP68 Water-proof degree , you possibly can wear it in all scene comparable to hiking, running and even swimming, but it`s supposed to be wiped dry to avoid the residual moisture in the ring soak your finger pores and skin for lengthy hour. 1.First, test if your smartphone has NFC operate. It will possibly usually be discovered in the system settings. If no relevant choices are found, contact with the producer publish-sale support, or search on Google if the smartphone mannequin has NFC function and confirm its NFC space.
Howdy, I do believe your webste could possibly be having internet browser compatibility problems.
When I take a look at your website in Safari, it looks fine however when opening in Internet Explorer, it’s gott some overlapping issues.
I just wanted to give you a quick heads up! Besides that, fantastic site! https://tiktur.ru/
anabolic sleep review
References:
https://hangoutshelp.net/user/slipwrench35
L-theanine is an amino acid present in tea. Although L-theanine is associated with several http://www.adelaidebbs.com.au/bbs/home.php?mod=space&uid=3004050&do=profile advantages, no analysis confirms if it is effective in treating bipolar disorder. L-theanine is a water-soluble amino acid present in inexperienced and black teas. It is also obtainable as a complement. The Food and Drug Administration (FDA) has given L-theanine a GRAS standing, which implies that it is usually recognized as protected. However, if you are at the moment on any medications to manage bipolar disorder, it’s best to discuss with your physician earlier than attempting L-theanine. Some bipolar medications have a sedating impact. While it is not a sedative itself, L-theanine can intensify this effect. In case you are on sedating medications or are unsure in case your medications are sedating, it is crucial to speak along with your doctor before trying L-theanine. Currently, there is no such thing as a definitive research that confirms if L-theanine is an efficient treatment for bipolar disorder. One 2021 case study involving a 26-yr-old lady with bipolar disorder, generalized anxiety disorder, and put up-traumatic stress disorder (PTSD) discovered that a personalized nutrition intervention – which included L-theanine – was in a position to improve mood.
I found out that herbal medicine is the best way to get rid of herpes virus because I have just been cured from the virus, I took the healing process by contacting dr excel for natural herbal treatment which really works wonders by neutralizing the virus, I do not feel the horrible symptoms and outbreaks anymore and my medical doctor told me the virus is gone after several test and I’m glad I finally got cured from this nasty disease. anyone with herpes should get in touch with this herbal man on his website to get cured from that virus! https://excelherbalcure.com his WhatsApp number +1(509) 883 9893
Herpes has been one of the most horrible virus in the United states and it’s spreading rapidly, and the government are only allowing treatments that can only suppress the virus and they keep on eliminating the idea of herbal doctors who were able to discover a way to completely cure the virus with herbal meds…I’m delighted to be finally cured from herpes after I applied for doctor excel herbal medicine which was sent to me to drink for some days,, I went back a month later to confirm my status and I tested negative severally and all the obvious symptoms were gone.. If I could get cured why do you think You can’t? or you still believe in the lying government and you keep spending money on buying their drugs .. I’m so glad I’m finally cured from it.. Get to know about doctor excel and his herbal formula on his Website…https://excelherbalcure.com or send him a message on his WhatsApp +1(509) 883 9893
I’m very excited to inform everyone that I’m completely cured from HSV1&2 recently. I have used Oregano oil, Coconut oil, Acyclovir, Valacyclovir, Famciclovir, and some other products and it’s really help during my outbreaks but I totally got cured from HSV1&2 with a strong and active herbal medicine ordered from a powerful herbalist called Dr Aba and it completely fought the virus away my nervous system and I tested negative after 14 days of using the herbal medicine. I’m here to let everyone know that herpes virus has a complete cure, I got rid of mine with the help of Dr Aba and his herbal exploit. Contact him via email: dr.abaherbalhome@gmail.com or WhatsApp him at +2348107155060
Lowering your blood strain too rapidly can improve dizziness, so dangerously excessive blood stress will probably be treated steadily. Additionally, research have shown that other medical difficulties and a gradual improve in frailty in older adults might make signs, comparable to dizziness, more pronounced. Consult with a doctor about specific treatments on your particular person symptoms and medical historical past. Before starting Ozempic, tell your doctor if you’ve had pancreatitis or other pancreatic issues before. Even a short-time period decrease in http://yin520.cn:3000/michelwere004 glucose may cause problems. If you have overweight or obesity, losing even a small quantity of weight will help lower your blood strain. As a potent antioxidant, quercetin has been proven to help cardiovascular well being, promote wholesome immune operate, and even enhance physical efficiency and recovery. “The leafy greens and fruits provide a superb quantity of fiber which is useful for healthy blood sugar levels. The nut butter-based mostly bars from Bobo’s have 15 grams of protein and 9 grams of fiber per bar. Some foods, together with turmeric, have blood-thinning properties which will assist promote blood circulation.
Here are some clues to help you judge your exercise intensity. Introduction to the JLL IC300 Pro Indoor Cycling Exercise Bike Looking for a new indoor exercise bike will be a tricky activity attributable to how many different fashions and options there are to consider. Diagnostic assessments that can rule out underlying well being conditions that may be inflicting your headache embody magnetic resonance imaging (MRI) or lumbar puncture (spinal tap). On 7 May 2009 she returned to Greenwich to serve because the centre piece of the Royal Navy’s celebration of a century of British naval aviation; on board had been examples of all the Navy’s operational helicopters. Haig, who had retired from military service to be able to serve as White House Chief of Staff for President Richard Nixon throughout the depths of the Watergate crisis, was abruptly put in as SACEUR after Watergate’s denouement. Eating and exercise go collectively. Understand the connection between consuming and exercise. If you are wholesome and wish to exercise at a vigorous intensity, opt for the higher end of the zone. For example, consuming a complex meal excessive in fiber, protein, or fats earlier than a excessive-intensity workout is not a good idea and should not finish nicely.
my blog post :: https://corps.humaniste.info/Here_s_How_Much_Exercise_You_Need_Based_In_Your_Age
I am amazed by Dr Aba herbal remedy. I Have had herpes for over 6 years with frequent outbreaks. Sometimes average 2-3 times per month. Before one breakout could end, the next would begin. Nothing has helped me. I came online in search for a possible way to see how I can fight this virus so I found Dr Aba here online after seeing a lot of testimonies of how he cured herpes and other diseases with natural herbs so I decided to give it a try, I only took his remedy for two weeks and I was completely cured. I recommend Dr Aba remedy to anyone suffering from herpes that wants to be completely cured too. email: dr.abaherbalhome@gamil.com and for quick response Message him on his whatsapp number +2348107155060
Always enjoy the articles on 1win India. Thanks for the useful info!
https://v.gd/1win_deposit_bonus_75632
Thanks. Helpful stuff!
Does anyone still doubt natural herbs? I’ve seen the great importance of natural supplements and the wonderful work they have done in people’s lives. I wonder why people still spend their money on surgery, injections and drugs each time they are sick. Natural herbs can cure all kinds of diseases and viruses contact Dr Ofenmu for more information visit https://drofenmuherbalcenter.simdif.com/ drofenmu@gmail.com
fastest muscle building supplement gnc
References:
which one of the following is not a potential danger of anabolic steroids? (https://schokigeschmack.de/freyajeffries3)
does steroids make your penis smaller
References:
best muscle growth pill; http://git.youkehulian.cn/adameece746263,
If an ergonomic chair isn’t an choice, be certain that your father’s chair has an adjustable height characteristic, the seat depth is roughly two-thirds the length of their thighs and buttocks, the back is a minimum of fourteen inches high, and the armrests are not more than 9 inches excessive. Osteoporosis is a critical problem for older ladies, resulting in height modifications and serious (sometimes deadly) fractures. Be acquainted with Mom’s “default setting,” and bear in mind of modifications. Don’t decrease modifications in your parents’ well being, even if they appear minor. If your guardian or dad and mom dwell in a multilevel house but has problems with stairs, consider a chair raise. Address your mother and father’ fears; be positive about your skill to search out an answer. It’s necessary to handle the truth that many individuals have undiagnosed health conditions which may be contributing to your signs. If you have diabetes, it’s necessary to observe your blood glucose (blood sugar) levels to assist keep your blood glucose levels within a target vary. While it’s an excellent way of life selection for a lot of, it isn’t acceptable for everyone. Which means there is no threat of low https://hwekimchi.gabia.io/bbs/board.php?bo_table=free&tbl=&wr_id=980719 sugar ranges while taking the treatment.
anavar stack
References:
definition anabolic steroids (http://jatushome.myqnapcloud.com:8090/hrxlawerence83)
steroids vs natural comparison
References:
legal steroids no side effects – https://git.deadpoo.net/marlenecastle9 –
credit can result in
References:
best steroid to burn fat (http://9dnakedeye.com.cn:9001/ramonitaharlow)
what are steroids used for in the body
References:
https://www.suyun.store/danielearls544
Roulette is onvervalste klasse en opwinding. Ik ontleed weddenschapspatronen en de psychologie achter het rondtollende rad.
rapid tone weight loss ingredients
References:
best research chemicals bodybuilding (https://git.zhukovsky.me/christomlin928)
My brother recommended I might like this website. He was totally right.
This post truly made my day. You cann’t imagine simply how much time I
had spent for this information! Thanks!
what are the long term effects of steroids
References:
http://git.yanei-iot.com:600/kittywinfield0
I presently follow an intermittent fasting weight loss program and a ketogenic diet that’s low-carb, excessive-fat, and reasonable in proteins. That’s vital, considering that people with type 2 diabetes usually tend to develop osteoarthritis than those without diabetes. That’s especially essential when you’ve got arthritis together with diabetes. These infections might be particularly dangerous when you’ve diabetes. Timing train appropriately may have an impact on sleep quality. Breathing may actually stop for brief periods of time in individuals with sleep apnea. You may discover it extra helpful to do interval coaching, which is while you train with durations of sluggish and moderate or intense exercise. But some simple tweaks can assist make your subsequent cookout a extra diabetes-pleasant occasion. Smoking could make that activity even more difficult. Try having your taco in a whole grain shell, corn tortilla, or even a lettuce wrap. Even with a gestational diabetes diagnosis, you can continue to snack safely throughout pregnancy. Smoking is addictive and may be very onerous to give up. Smoking can speed up the event of diabetic retinopathy and make it worse. You may make modifications to your favourite meals to add more fiber, protein, antioxidants, and healthy fats.
Also visit my web site: https://pattern-wiki.win/wiki/User:PhilippHenning7
I just like the valuable information you supply for your articles.
I will bookmark your blog and check once more right
here regularly. I’m somewhat sure I’ll learn many new stuff proper right here!
Good luck for the next!
คอนเทนต์นี้ อ่านแล้วเข้าใจง่าย ค่ะ
ผม เพิ่งเจอข้อมูลเกี่ยวกับ
มุมมองที่คล้ายกัน
ลองเข้าไปอ่านได้ที่ Loreen
น่าจะเป็นประโยชน์กับหลายคน
มีการเรียบเรียงที่อ่านแล้วลื่นไหล
ขอบคุณที่แชร์ เนื้อหาดีๆ
นี้
หวังว่าจะมีการอัปเดตเนื้อหาเพิ่มเติมเร็วๆ นี้
Wonderful stuff. Many thanks!
Please let me know if you’re looking for a article writer for your site.
You have some really good posts and I believe I would be a good asset.
If you ever want to take some of the load off, I’d really like to write some material for your blog in exchange for a
link back to mine. Please shoot me an e-mail if interested.
Many thanks!
Abstract: The Internet of Things (IoT) ecosystem is presented with its options and particularities in the first part of the paper. In the second section are introduced the technical terminology and how inter-area applied sciences resembling: Internet/Semantic and Middleware, RFID/NFC and Smart Objects-embedded units are linked together. The paper shows an implementation of the authentication process with a proximity tag/card implemented in Java SE, within the third section. The conclusions are offered in the fourth part and they describe the chance to develop a proof of idea project, which can have a number of implementations. This new idea is an innovative answer to appreciate a quantitative analysis of all the issues that surround us. A prerequisite wanted for the Internet of Things is the radiofrequency identification (RFID). People have limited time, attention and accuracy, in order that they aren’t excellent at capturing and storing details about all the issues from the actual world (even when we include 2D barcodes used for Automatic Data Acquisition functions).
Here is my page :: https://www.knowledgequran.com/practicing-taqwa-in-your-life/
When it’s sizzling out give me a flavored iced tea any time. There are a number of notable regional variants of Indonesian http://git.gko73.ru/earneststeadha drink in addition to the common es teh manis (sweet iced tea). There are two legends behind this tea: Wei and Wang. Instant versions of Suutei Tsai are additionally obtainable. Suutei tsai is often used for particular events akin to Tsagaan Sar and Naadam. It may be served as a snack or after a meal with green tea on special events or only for household and visitors. A-hlu means alms and is synonymous with a novitiation ceremony known as Shinbyu, although lahpet can also be served in this type at hsun jway (providing a meal to monks) and weddings. It is claimed that the word “nyahi” itself comes from Arabic culture, from the word “syay,” which means tea. Taiwanese tea tradition encompasses a more traditional Chinese tea culture, adopted by centuries of Han Chinese migrations onto the island. The sweetener will probably be bitten first, adopted by sipping sizzling tea.
The Ring Pan-Tilt Indoor Cam is the kind of handy DIY sensible residence device that brings too much to the desk, despite the fact that there are plenty of pan-tilt-zoom good cams in the marketplace (some are quite a bit cheaper than Ring’s latest). However when you already use a number of Ring parts, the Pan-Tilt Indoor Cam is a nice various to running two or three high indoor cams in the identical space of your private home or enterprise. I’ve put in and labored with a number of Ring cameras earlier than, so I had some UI experience going into this setup. Fortunately, the Pan-Tilt was a breeze to activate and delivered spectacular visuals, together with an array of helpful in-app options. Nonetheless, other pan-tilt-zoom cams do more for much less. The Ring Pan-Tilt Indoor Cam isn’t essentially changing the game for indoor sensible cams, however we’re glad the corporate now presents a couple of versatile options. And utilizing this one to maintain tabs on your house or business is as simple as selecting a perch and connecting to Wi-Fi.
my webpage https://bongs.wiki/index.php/Amazon_2025_Hardware_Event:_The_14_New_Gadgets_And_The_Way_To_Purchase_Them
world abs pro stack
References:
https://www.udrpsearch.com/user/foamhyena0
super test side effects
References:
steroid Forum where to buy online (https://chessguide.com/members/colorbank5/activity/64614/)
Docosahexaenoic acid (DHA) is an omega-three fatty acid – and it’s one of the most important. Its present in various seafoods and is essential for brain development and operate. Docosahexaenoic acid (DHA) is one in every of an important omega-3 fatty acids. Like most omega-three fats, it’s linked to many well being benefits. Part of every cell in your body, DHA plays an important role in your https://opensourcebridge.science/wiki/User:MiriamDeGroot and is completely essential during pregnancy and infancy. Since your body can’t produce it in adequate amounts, you want to acquire it out of your eating regimen. This text explains every thing it is advisable learn about DHA. DHA is primarily found in seafood, resembling fish, shellfish, and fish oils. It also occurs in some types of algae. While it can be synthesized from alpha-linolenic acid (ALA), one other plant-based mostly omega-3 fatty acid, this course of may be very inefficient. Because your body can’t make DHA in vital quantities, you should get it from your weight loss plan or take supplements.
Great post. I was checking continuously this weblog and I’m impressed!
Very helpful info specifically the last phase 🙂 I care for such
information much. I was looking for this particular information for a long time.
Thank you and good luck.
Definitely imagine that which you stated. Your favorite reason appeared to be at the web the simplest factor to take into accout of.
I say to you, I certainly get irked at the same time as people think about issues that they just do not recognize about.
You managed to hit the nail upon the top and outlined
out the entire thing without having side effect , other people can take a signal.
Will probably be back to get more. Thank you
Usually I do not learn post on blogs, but I wish to say that this write-up very forced me to take a look at and do it!
Your writing taste has been surprised me. Thanks, quite nice post.
I thought I was never going to get cured from Herpes because I was told that there is no cure for the virus but Just last month I saw on the internet how some people talks about being cured from the same virus after they finish drinking a herbal medicine! I was so interested that I contacted the herbal man on his website and request for the herbal meds as well, he responded and answered my questions with prove, then he went ahead and send me the medication through DHL which I drink for almost two weeks as he prescribe and now I just test negative to the virus and all the sores were gone immediately I started drinking the herbal meds. Contact this herbal man on his website/WhatsApp and get cured from that parasite called herpes. +1 509 883 9893 https://excelherbalcure.com
Рабочая зеркало для Кракен darknet market
Кракен — лидерский маркетплейс в даркнете с верифицированными магазинами и простым интерфейсом.
Мы публикуем только рабочие URL, чтобы гарантировать постоянный и постоянный подключение в любое время.
A China press brake machine is actually a beneficial investment in any kind of sheet metal workshop or manufacturing facility. Whether utilized in large-scale production or tiny production units, its efficiency and longevity directly impact success. To accomplish regular results and make the most of return on investment, operators need to comply with appropriate care and maintenance methods. Extending the life expectancy of press brake machines requires a combination of regular evaluations, proper operation, and prompt upgrades, https://justpaste.it/k4qhu.
Рабочая URL для Кракен darknet market
Kraken — трастовый marketplace в даркнете с проверенными саппортами и интуитивным UI.
Мы публикуем только проверенные зеркала, чтобы обеспечить защищенный и стабильный доступ без перебоев.
God bless Dr. Aba for his marvelous work in my life, I was diagnosed of HERPES since 2019 and I was taking my medications, I wasn’t satisfied i needed to get the HERPES out of my system, I searched about some possible cure for HERPES and i saw a comment about Dr. Aba how he cured HERPES, DIABETES, HEPATITIS B and CANCER with his herbal medicine, I contacted him and he guided me. I asked for solutions, he started the remedy for my health, he sent me the herbal medicine through DHL. I took the medicine as prescribed by him and 14days later i was cured from HERPES, Dr. Aba truly you are world greatest herbal doctor, do you need his help also? Why don’t you contact him today through his email address: dr.abaherbalhome@gmail.com and his WhatsApp phone number +2348107155060
I’m curious to find out what blog system you are working with?
I’m having some small security issues with my latest site and I would
like to find something more safe. Do you have any suggestions?
This is an enjoyable read !
Fine way of telling, and pleasant post to get facts on the topic of my presentation subject matter, which
i am going to convey in university.
Hi there! I could have sworn I’ve visited this web site before but after looking at
many of the articles I realized it’s new to me. Anyhow, I’m certainly
pleased I found it and I’ll be book-marking it and checking back frequently!
Hi there all, here every one is sharing these familiarity, so it’s nice
to read this blog, and I used to pay a quick visit this blog daily.
I’m here to share my situation of herpes virus because I was heartbroken and depressed when I got diagnosed of Genital herpes.. I was given some antiviral pills to “take which even made me more sick and gave me headaches to the point of me puking. I searched everywhere for a solution then I came across this herbal doctor called Excel who gave me hope that he can cure me totally from the virus with his herbal medication so I gave it a try and he prepared and send me the medication through DHL and I drink it for several days the sores were the first to go away and I have just tested negative to the virus for the second time. Believe me this is real, herpes can actually be cured with the right use of herbs! Get to know about this herbal man and his medication on his website Excelherbalcure.com or talk to him directly on WhatsApp..
Budgetbeheer is de basis van winstgevend gokken. Ik geef
je praktische technieken om je budget te controleren.
side effects of cjc and ipamorelin
References:
https://spandexjobs.com/employer/ipamorelin-benefits-uses-and-side-effects/
This design is spectacular! You obviously know how to keep a reader entertained.
Between your wit and your videos, I was almost moved to
start my own blog (well, almost…HaHa!) Wonderful job.
I really enjoyed what you had to say, and more than that, how you presented it.
Too cool! https://beta.estatelinker.co.uk/agent/octaviasweet0/
I used to be able to find good information from your articles. https://www.finestresidences.com/author/huldacovey3074/
Very quickly this web site will be famous amid all blog users, due to
it’s nice content https://Havensuitesbnb.com/author/twtsophia72981/
It’s wonderful that you are getting thoughts from
this article as well as from our dialogue made at this time. https://sarahjoanthailand.com/author/teodorolaver39/
Your way of explaining all in this post is in fact pleasant, every one be
capable of simply understand it, Thanks a
lot. https://mcmillancoastalproperties.Com.au/author/bethlandry8684/
Excellent post. I was checking constantly this
blog and I am impressed! Very helpful information particularly the last part 🙂 I
care for such information a lot. I was looking
for this particular info for a very long time.
Thank you and best of luck. https://lagosproperty.net/author/leoniestitt024
hello there and thank you for your info – I’ve certainly picked up
anything new from right here. I did however expertise some technical points using this web site, as
I experienced to reload the website a lot of times previous to
I could get it to load correctly. I had been wondering if your web
hosting is OK? Not that I’m complaining, but sluggish loading
instances times will very frequently affect your placement in google
and could damage your quality score if advertising and marketing with
Adwords. Well I’m adding this RSS to my email and could look out
for a lot more of your respective interesting content. Make sure
you update this again soon. http://WWW.Shandurtravels.com/companies/escort/
This is very fascinating, You are a very professional blogger.
I have joined your feed and look forward to searching for extra of your magnificent post.
Also, I’ve shared your website in my social networks https://Ferninnholidays.com/agent/demisomerset8/
Wow, this piece of writing is nice, my younger sister is analyzing these kinds
of things, so I am going to let know her. https://Real-Estate-Thai-Broker.com/author/kendramarie251/
ipamorelin clinical trial growth hormone
References:
buy ipamorelin cjc 1295 (https://www.z4sh.com/marylin03b237)
ipamorelin igf
References:
https://enouvelles.top/item/460107
cost of cjc 1295 ipamorelin
References:
Ipamorelin Tesamorelin Dosage (https://www.flughafen-jobs.com/companies/ipamorelin-review-dosage-benefits-results/)
ipamorelin peptide uk
References:
https://www.simpra.org:3000/rickiej557294
Hello! I could have sworn I’ve been to this blog before but after reading through some of the post I realized it’s new to me.
Anyhow, I’m definitely delighted I found it and I’ll be book-marking and checking back frequently!
Smart bulbs supply a easy solution to improve your house. Not only are they affordable, however they’re a lot simpler to install than most different good gadgets – permitting even DIY novices a chance to take part on the smart residence movement. From permitting you to program schedules and change their colours to setting a “vacation mode” and syncing with other sensible gadgets, they’re a properly-rounded addition to most rooms. Nonetheless, choosing one of the best sensible light bulb for your property is usually a problem, as there are tons of choices available on the market. Lots of them share comparable specs, however not all of them are dependable. Some are also sluggish to respond to your commands. Others are low-high quality bulbs with a lackluster vary of colors to choose from. Thankfully, the vast majority of smart mild bulbs are LED bulbs, so regardless of which product you select, it’ll seemingly do an important job of cutting down your vitality consumption.
my webpage :: http://www.sblookme.top:10880/alanabernardin
Кракен (kraken) – ты знаешь что это, уже годами проверенный сервис российского даркнета.
Недавно мы запустили p2p обмены и
теперь вы можете обменивать любую сумму для пополнения.
Всегда есть свежая ссылка кракен через ВПН:
кракен официальный сайт
I must thank you for the efforts you have put in penning this blog.
I really hope to view the same high-grade blog posts from you
later on as well. In fact, your creative writing abilities has encouraged me
to get my very own site now 😉
mod grf ipamorelin ghrp-2 blend
References:
mk 677 ipamorelin stack (https://worldaid.eu.org/discussion/profile.php?id=1021666)
igf-1 lr3 cjc 1295 ipamorelin stack
References:
https://clicabio.com/halleyolde
cjc 1295 ipamorelin peptide injections
References:
https://www.valenzuelatrabaho.gov.ph/employer/ipamorelin-side-effects-safe-and-effective-results/
reconstitute ipamorelin
References:
How Long Will My 2Mg Ipamorelin Bottle Last (https://cineblog01.rest/user/floodvault88/)
I’m here to share my situation of herpes virus because I was heartbroken and depressed when I got diagnosed of Genital herpes.. I was given some antiviral pills to “take which even made me more sick and gave me headaches to the point of me puking. I searched everywhere for a solution then I came across this herbal doctor called Excel who gave me hope that he can cure me totally from the virus with his herbal medication so I gave it a try and he prepared and send me the medication through DHL and I drink it for several days the sores were the first to go away and I have just tested negative to the virus for the second time. Believe me this is real, herpes can actually be cured with the right use of herbs! Get to know about this herbal man and his medication on his website Excelherbalcure.com or talk to him directly on WhatsApp..
God bless Dr. Aba for his marvelous work in my life, I was diagnosed of HERPES since 2019 and I was taking my medications, I wasn’t satisfied i needed to get the HERPES out of my system, I searched about some possible cure for HERPES and i saw a comment about Dr. Aba how he cured HERPES, DIABETES, HEPATITIS B and CANCER with his herbal medicine, I contacted him and he guided me. I asked for solutions, he started the remedy for my health, he sent me the herbal medicine through DHL. I took the medicine as prescribed. by him and 14days later i was cured from HERPES, Dr. Aba truly you are world greatest herbal doctor, do you need his help also? Why don’t you contact him today through his email address: dr.abaherbalhome@gmail.com and his WhatsApp phone number +2348107155060.
Hi there! This post could not be written much better!
Looking through this article reminds me of my previous roommate!
He constantly kept talking about this. I will send this article to him.
Pretty sure he’ll have a good read. Many thanks for sharing!
Hey there! I could have sworn I’ve been to this website before but after reading
through some of the post I realized it’s new to me.
Nonetheless, I’m definitely happy I found it and I’ll be book-marking and checking back
often!
Hi, the whole thing is going well here and ofcourse every one is sharing information, that’s
in fact fine, keep up writing.
Il Tribunale appone al documento tradotto tutti i timbri del caso, ma la traduzione asseverata assume un valore legale solo in seguito alla firma
duplice del cancelliere e del traduttore. http://www.hondacityclub.com/all_new/home.php?mod=space&uid=3542152
Great blog here! Also your site loads up
fast! What host are you using? Can I gget your affiliate link to your host?
I wish my site loaded up as quickly as yours lol https://digital-presense.blogspot.com/2025/08/advancing-digital-presence-in.html
Can I juust say wha a relief to discover somebody that actually knows
whatt they’re discussing on the internet.
You derfinitely know how to bring a problem to light and make it
important. More and more people ought to look at this and understand this side of your story.
It’s surprising you’re not more popular given that you certainly have thhe gift. https://mark-Strategies.blogspot.com/2025/08/online-marketing-strategies.html
Immunological memory is the ability of the immune system to rapidly and particularly acknowledge an antigen that the body has beforehand encountered and provoke a corresponding immune response. Usually, they’re secondary, tertiary and different subsequent immune responses to the same antigen. The adaptive immune system and antigen-specific receptor technology (TCR, antibodies) are liable for adaptive immune memory. After the inflammatory immune response to hazard-associated antigen, a few of the antigen-specific T cells and B cells persist in the physique and develop into long-dwelling memory T and B cells. After the second encounter with the identical antigen, they recognize the antigen and mount a quicker and extra strong response. Immunological https://wiki.lovettcreations.org/index.php/Maintaining_The_Mind_Nimble_Via_Puzzles is the premise of vaccination. Emerging resources show that even the innate immune system can provoke a extra efficient immune response and pathogen elimination after the previous stimulation with a pathogen, respectively with PAMPs or DAMPs. Innate immune memory (additionally known as skilled immunity) is neither antigen-specific nor dependent on gene rearrangement, however the different response is brought on by adjustments in epigenetic programming and shifts in cellular metabolism.
bookmarked!!, І гeally ⅼike your site!
Нere is my site … ремонт МФУ
Hello to every body, it’s my first pay a visit of this weblog; this blog consists of amazing and actually
fine stuff in favor of visitors.
I already gave up hope on ever getting cured from Herpes virus’ because I tried several treatment and none of them worked for me and they always say there was no cure for virus’ but then I came across a post on the internet about a herbal medicine being use to cure the same virus then I quickly contacted the herbal man on his website and request for the same medicine and he prepare and sent me the herbal medicine to drink which I did according to the way he instructed. I doubted at first because I never know herbal medicine was so potent but I was cured from the virus after I finish drinking the herbal medication. my doctor confirmed me negative of the virus and all the blisters were the first to go the moment istarted the meds. feel free to visit and contact the herbal man on his website. https://excelherbalcure.com
Your mode of describing the whole thing in this
article is truly fastidious, every one be able to simply know it, Thanks a lot.
I’m still trying to process the fact that I have just been cured from herpes virus because my medical doctor just confirmed me negative after having the virus for more than five years. I still remember how I got the virus back then from my cheating boyfriend and we actually broke up because of it but now I have just been cured after I finish drinking the herbal meds that were prepared and sent to me by a herbal man called excel. Get to know about this herbal man and his herbal medication on his website https://excelherbalcure.com
It’s awesome to pay a quick visit this web page and reading thee views
of all colleagues on the topic of thiis paragraph, while I am
also keen of getting know-how.
my webpage :: butt
best legal steroid stack
References:
http://www.mmgold.top:8103/kathikinsella2
I didn’t realize how many options there were for marijuana clones until I found RMCNARGS.org – really helpful.
how much hgh should a woman take
References:
how many ml of hgh per Day (https://www.transecc.com/princessrussel)
how to cycle dianabol
References:
https://doc.adminforge.de/TwbzL_fGT_i268Fxf0oMWg/
Свойства электрокорунда в шлифовальных материалах
Свойства электрокорунда и его применение в шлифовальных материалах и технологиях
Для достижения оптимальных результатов в шлифовке стоит рассмотреть использование корундового абразива, который демонстрирует повышенную твердость и устойчивость к износу. Эти свойства делают его идеальным выбором для обработки металлических и неметаллических поверхностей.
При работе с шлифовальными изделиями, содержащими корунд, рекомендуем обратить внимание на зернистость. Мелкие частицы обеспечивают более тонкую обработку, в то время как крупные идеально подходят для снятия большого объема материала. Использование градации зерен позволяет достигать желаемого уровня шлифовки, что значительно улучшает качество готовых деталей.
Температурная стойкость корундового абразива также важна. Он сохраняет свои характеристики даже при повышенных температурах, что делает его подходящим для работ в условиях высокой нагрузки. Выбор правильного типа абразивного инструмента, учитывая его термическую устойчивость, позволит увеличить срок службы инструмента и снизить затраты.
Кроме того, обращайте внимание на зернистую структуру и распределение частиц. Это влияет на эффективность работы и тем самым на итоговую производительность. Исключительные механические характеристики корунда позволяют проводить операции с высокой точностью и минимальными затратами времени.
Влияние зернистости на качество обработки поверхностей
Рекомендуется использовать перморазмеры зерна от 80 до 320 для достижения высокого качества обработки. Более крупные зерна (от 36 до 80) подойдут для предварительной шлифовки, позволяя быстро удалять большие дефекты и выравнивать поверхность. Однако для финишной обработки предпочтительнее применять более мелкие фракции, такие как 120-240, поскольку они обеспечивают более гладкое окончательное покрытие.
Выбор размеров зерен напрямую влияет на степень шероховатости обрабатываемой поверхности. Мелкие абразивы создают меньше зазоров, что приводит к меньшему количеству дефектов и более качественной отделке. Например, использование зерен 320 позволит достичь Ra менее 0,4 мкм, тогда как при зернах 80 уровень шероховатости может значительно увеличиться.
При работе с твердыми материалами, такими как сталь или сплавы, оптимально сочетать зерна 120 и 240 для одного этапа обработки. Это гарантирует, что начальные неровности будут сглажены без чрезмерного нагрева и повреждения основы. Более того, оптимизация скорости подачи также играет ключевую роль в достижении наилучших результатов при определенной зернистости.
Для повышения эффективности рекомендуется тестировать несколько комбинаций зерен на контрольных образцах. Это позволит выбрать наилучший вариант для конкретного случая, минимизируя время и ресурсы, затрачиваемые на последующую доработку.
Сравнение электрокорунда с другими абразивами в процессах обработки
Рекомендуется использовать корунд для шлифовки металлических и абразивных материалов благодаря его высокой твердости и износостойкости. Его твердость по шкале Мооса составляет 9, что позволяет эффективно обрабатывать широкий спектр заготовок.
Сравнивая с алмазными зернами, корунд является более доступным, хотя алмазы обеспечивают лучшую производительность на твердых материалах. Тем не менее, для общих операций шлифовки корунд часто предпочтительнее из-за своей экономичности.
Циркониевый оксид также часто используется в шлифовальных приложениях. Он предлагает хорошие результаты на нержавеющей стали, но его стоимость выше. В то же время корунд может оказаться более эффективным в тяжелых условиях работы благодаря своей универсальности.
При необходимости обработки стекла или керамики стоит рассмотреть использование силиконового карбида, который показывает себя лучше при работе с хрупкими заготовками. Однако корунд остается предпочтительным для более широкого круга задач и экономичных решений.
Выбор абразивного материала зависит от конкретных условий работы и требуемого результата. Для большинства общих операций корунд будет надежным выбором, совмещающим стоимость и производительность. Оценка работоспособности различных абразивов вполне может варьироваться в зависимости от используемого оборудования и обрабатываемых материалов.
My blog post – https://rms-ekb.ru/catalog/metallicheskii-poroshok/
Whereas the former will encourage nitrogen retention and protein synthesis to pack on muscle tissue, the latter works to keep your natural testosterone production at its peak. As Quickly As your Dbol and Test cycles are over, you’ll should go through a full-fledged Publish Cycle Remedy (PCT). Largely, bodybuilders turn to Dianabol and Testosterone cycles to increase muscle mass and energy in order that they can pull off those strenuous reps easily. D-Bal creates an anabolic surroundings in your physique selling protein synthesis and nitrogen retention, laying floor for optimum muscle growth within the process. It will increase VO2 max (maximizes oxygen uptake) in order that your muscular tissues don’t get fatigued easily. Take A Look At Deca Dbol cycle is a robust mixture of steroids that can assist improve muscle progress shortly. Furthermore, lots of bodybuilders also use Testosterone along with these steroids to get even better results.
Individuals have been using Deca-Max for years, with astonishing outcomes rivaling Nandrolone. Deca-Max offers the most ideal, safe, and LEGAL various to Nandrolone, and also you won’t be wasting any time or cash on combating nasty unwanted effects. Nonetheless, adding Arimidex or Aromasin for progesterone is essential for Deca as they work better at this job than Nolvadex. Nandrolone is easily some of the in style AAS – we might place it in the high three AAS of all time. But that doesn’t imply you won’t ask questions about whether or not there are extra appropriate PEDs in your needs. With Nandrolone’s appealingly low androgenic ranking, it might seem on paper a minimal of that this might be a steroid that ladies could use with minimal problems. Nonetheless, virilizing symptoms are simply as likely to develop on Nandrolone as with other AAS.
For quicker muscle gains and rapid muscle building, stacking two or extra steroids can get you the place you want to be sooner. From beginner-friendly choices like Dianabol for fast muscle gains to Winstrol for chopping fat whereas preserving lean mass, there’s a secure and efficient possibility for each aim. As users progress beyond this initial interval, they could observe more distinct muscular positive aspects and performance enhancements.
The side effects are simply insufferable to most and can result in unhealthy life quality. Many will choose to shy away from Dianabol consequently and opt for drier, newer compounds. It is sensible to remember that these unwanted effects will be present in all variations of Testosterone, and additionally will be dose-dependent. All Testosterone(s) will act the same within the physique, and their outcomes is not going to be completely different from one another. When one thing has the same name, however a unique pre or suffix, it normally means the discharge time is barely completely different. Both Testosterone Cypionate and Testosterone Enanthate are plain Testosterone. One is not better than the other, one doesn’t maintain less water than the opposite, and neither is worse than the opposite.
That includes each its constructive results and its negatives (and there ARE plenty of negatives you want to know about). Below are the fundamental however critical features of Trenbolone Acetate to focus on. Stacking steroids refers to the practice of mixing a quantity of forms of steroids during a specific interval or cycle. After administration, CrazyBulk Testosterone Enanthate is gradually launched into the bloodstream, the place it maintains elevated ranges of circulating testosterone. Bodybuilders who are new to the game are sometimes extra susceptible to damage than those who have extra expertise.
After reading it is possible for you to to start one of the best Anavar cycle in your needs. You can’t go mistaken with this basic stack, with solely the dosage of each compound figuring out how great your outcomes might be. Size, strength, and feeling wonderful total are the significant benefits of this easy but potent stack. You can use Deca at low doses solely for joint support and restoration, however below, I element a efficiency dose of both these AAS to give attention to bulking and strength positive aspects. Some bodybuilders consider Deca is greater than usable for cutting cycles where you’re running a calorie deficit food regimen. But to do it right, you’ll want to ensure estrogen is managed so water retention doesn’t turn into an issue – preserving in thoughts you will nonetheless need to stack with testosterone at TRT doses.
Customers typically report experiencing a heightened sense of motivation and aggression, which can positively impact coaching intensity and focus. This mental drive can contribute to improved performance and leads to the fitness center. Dianabol stands out for its distinctive muscle-building capabilities, offering users with significant positive aspects in muscle mass and energy inside a brief period. It stimulates protein synthesis and increases the rate of nitrogen retention in the muscular tissues, facilitating the growth and repair of muscle tissue. Dbol’s anabolic results additionally enhance the body’s ability to retain more glycogen, resulting in fuller and more voluminous muscular tissues. This characteristic is especially advantageous for bodybuilders aiming to attain a more muscular and defined look.One key feature of Dianabol is its capacity to improve endurance and stamina. By enhancing glycogenolysis, Dbol permits the muscles to effectively make the most of stored glycogen, leading to increased vitality ranges during intense workouts.
This will nearly exclusively be Deca-Durabolin, with NPP being more durable to find in the US in pharma grade. If you don’t prefer it, you’ll get it out of your system fast and find yourself wasting much less money – with Deca-Durabolin, you’re looking at no much less than 5 to six weeks of use before you can consider your response. Folks know what this common steroid medication (https://www.valley.md/dianabol-cycle-benefits-and-risks) does; after all, it’s been used by bodybuilders for more than 50 years. Many of the optimistic evaluations and experiences you’ll hear from Deca-Durabolin users relate to its therapeutic and therapeutic results. Deca is medically very helpful for treating osteoporosis and lack of bone tissue.
Effectiveness is the foundation of any effective fish processing procedure. factories that incorporate the appropriate technology with experienced team can attain much faster production, constant quality, and decreased waste. From handling fragile fillets to handling large volumes, maximizing process is key. Implementing modern equipment and systems ensures that processes run smoothly, while correct training keeps the labor force efficient, https://www.furvilla.com/profile/232596.
I was recommended this web site by mmy cousin. I’m
not sure whether this post is written by him as nobody else know such detailed
about myy trouble. You’re incredible! Thanks!
Herre is my site: slots
Tonight I went out to select up a few gadgets. I needed to get some drinks and a https://sun-clinic.co.il/he/question/best-solar-bug-zapper/ zapper mild. The grocery retailer was already closed, so I turned to one of the little hardware/normal outlets that line the highway. Me: 有杀蚊子的灯吗? Do you might have lights that kills mosquitoes? Shopkeeper: 么哇某某灯? Me: 叫什么? Me: 哦,谢谢啊。 (Oh. ’s straightforward to grasp. So I didn’t get my bug zapper mild, but I received a brand new phrase. Armed with the brand new vocabulary, I quickly asked three other shops. None of them had any “extinguish mosquitoes lights” both. I failed my mission, however I had a brand new word cemented in my reminiscence. It made me nostalgic… I used to be taught so many new vocabulary words that approach, however I only simply realized how lengthy it’s been. Carrefour just isn’t as fun. Note: If you’re reading this via RSS feed, then my experimental “fuzzy response” CSS effect (on the shopkeeper’s preliminary reply) in all probability didn’t carry over. Visit the positioning to see what you’re purported to.
Сравнение драгоценных металлов и обычных сплавов в припоях
Сравнение свойств и применения драгоценных металлов и обычных сплавов в пайке
Использование золота и серебра, несомненно, имеет свои преимущества в соединениях, требующих высокой проводимости и коррозионной устойчивости. Эти элементы обеспечивают надежные соединения, которые выдерживают длительное воздействие различных факторов окружающей среды. Однако их высокая стоимость может быть решающим фактором для больших объемов работ.
С другой стороны, медь и алюминий часто применяются в широком круге задач благодаря прекрасным механическим свойствам и более доступной цене. Аллюминиевые сплавы, обладающие хорошей прочностью и легкостью, отлично подходят для использования в условиях, где вес важен. Эти комбинации составляют оптимальный выбор для массового производства.
Для обеспечения максимальной надежности соединений в производственных условиях следует учитывать не только соотношение стоимости и качества, но и специфические потребности проекта. Подбор правильного состава напрямую влияет на долговечность и производительность элементов, что в конечном итоге отражается на всех этапах работы.
Преимущества и недостатки использования драгоценных металлов в пайке
Выбор материалов влияет на прочность конструкции. Преимущества использования благородных сплавов включают отличную электро- и теплопроводность, что гарантирует надежное соединение и минимизирует риск перегрева. Высокий уровень коррозионной устойчивости их делает идеальными для работы в агрессивных условиях.
Тем не менее, стоимость данных материалов заметно выше, что может увеличить общую бюджетную смету проекта. Элементы с таким составом требуют более тщательной обработки и более сложного технического процесса, что может замедлить срок выполнения работ.
Чувствительность к воздействию ультрафиолета и высокая теплопроводность могут быть проблемой в некоторых ситуациях. Соединения из благородных сплавов иногда требуют дополнительных мер предосторожности при эксплуатации.
В конечном итоге, выбор благородных материалов целесообразен в тех случаях, когда требуется максимальная надежность и долговечность пайки, а экономия средств не является первоочередной задачей.
Выбор сплавов для различных технологических процессов и условий эксплуатации
Для сварки, лучше использовать продукты на основе серебра или золота, так как они обеспечивают превосходную проводимость и коррозионную стойкость, что идеально подходит для электронных компонентов. Если требуется высокая прочность соединения при высоких температурах, отдайте предпочтение материалам на основе никеля или меди. Эти соединения гарантируют надежную работу в экстремальных температурных условиях.
Для монтажа в электрических цепях следует рассмотреть сплавы с высоким содержанием олова, которые обладают отличной текучестью и позволяют достигать устойчивых соединений. При эксплуатации в условиях повышенной влажности целесообразно использовать защищенные варианты на основе цинка, способные предотвратить окисление и обеспечить долговечность.
При работе с легкими конструкциями целесообразно выбирать алюминиевые смеси, обладающие низким весом и удовлетворительной прочностью, что будет актуально в авиации. В случае, когда важна антифрикционная способность, стоит остановиться на бронзах, которые показали хороший результат в механизмов с подвижными частями.
Для применения в агрессивных химических средах эффективными являются никелевые сплавы с добавлением циркония. Они демонстрируют высокую стойкость к коррозии и износостойкость. В случае необходимости использования в косметологических процедурах лучше отдавать предпочтение платиновым изделиям, так как они гипоаллергенны и безопасны для здоровья.
Таким образом, выбор материала зависит от конкретных задач и условий эксплуатации, что позволяет оптимизировать процессы и повысить надежность соединений.
My web site; https://rms-ekb.ru/catalog/izdeliia-iz-dragotsennykh-i-blagorodnykh-metallov/
Appreciate the recommendation. Let me try it out. https://www.metooo.es/u/6895c68d78dca46f0b97863c
What i don’t realize is in fact how you’re not really much more well-favored than you
might be now. You are so intelligent. You recognize thus considerably with regards to this subject, made
me in my view believe it from numerous varied angles.
Its like women and men don’t seem to be fascinated unless it’s something to do with Lady gaga!
Your individual stuffs excellent. Always maintain it up!
Good day! Would you mjnd if I share your blog with my facebook group?
There’s a lot of people that I think would really enjoy your content.
Please let me know. Cheers
Having read this I thought it was rather enlightening.
I appreciate you spending some time and effort to put this information together.
I once again find myself spending way too much time both
reading and commenting. But so what, it was still worthwhile!
For most recent information you have to visit the web and on world-wide-web I found this website
as a most excellent web page for most recent updates.
Is it any marvel that order & consistency are extremely valued in that society? Brazil’s icon will not be an object but a celebration: Mardi Gras (Carnivale) – which fits a rustic where living life to the fullest & enjoying the celebration are deeply valued. Disney parks and you’ve got your self the makings of a world-class philosophical/theological rant. I’ve began down this road, so be a part of me as I tackle the important thing query right here. Why is that so many people are drawn to Disneyland like a moth to a flame? Or, to borrow from A Bug’s Life, a mosquito to a https://koreanaggies.net/board_Lmao72/1906892 zapper? In the world of Disney (and by extension, Disneyland), there are heroes & villains. Rather than a world that appears to be typically painted in shades of grey, the park gives a place where guests can see good triumph over evil. From encounters with characters to the special attention to visitor relations that each Cast Member is skilled in, the oldsters at Disneyland want you not solely to benefit from the attractions but in addition to connect on a private stage. It’s telling that none of their publicity supplies (that I know of) advertise this as a great vacation for individuals – as a substitute, they emphasize how experiencing the park collectively brings families & friends nearer with the bond of shared reminiscences. The park is designed to involve you in adventure after journey – whether it’s flying by way of outer house (Star Tours, Space Mountain) or coping with pirates (Pirates of the Carribean) or going through ghosts (the Haunted Mansion) or exploring the wilds of Africa & Asia (the Jungle Cruise). For these of you in the studying viewers who need to listen to me quote some Scripture right now so you will not brand Erwin (or me, by extension) as a Mickey-ears sporting heretic, how about John 14:6? Or how about 1 Corinthians 13:13, Colossians 1:5, 1 Thessalonians 1:3 & 5:8?
Good day everyone, I wanted to bring up the fascinating topic of personal color analysis online.
This topic has captivated me for some time, and I decided to
raise this question here to investigate how digital tools and virtual consultations are influencing
the way we perceive our best colors. With technology becoming an integral part of self-expression, it’s thrilling to
see how personal color analysis has evolved beyond traditional in-person sessions.
One of the most compelling aspects of personal color analysis online is the convenience it offers.
Unlike standard methods that require face-to-face interaction, online platforms use comprehensive questionnaires,
uploaded photos, and sometimes AI to propose color palettes customized to one’s unique complexion, hair, and eye color.
However, a frequent misconception is that online analysis
can substitute for professional expertise completely, which
isn’t always the case. The [b]precision[/b] of results often is affected by
factors like lighting, photo quality, and user input, making it essential to approach these services
with both excitement and a bit of caution.
In summary, personal color analysis online offers a convenient way
to discover colors that improve your natural beauty, but it
also includes some limitations worth considering. I would love to hear
your
color-analysis-quiz.org
We are a group of volunteers and opening a new scheme in our community.
Your site offered us with valuable info to work on. You’ve done a formidable
job and our whole community will be grateful to you. https://click4r.com/posts/g/21706190/stainless-metal-development-the-way-ahead-for-indoor-hydrotherapy-poo
hgh and testosterone cycle results
References:
how much Hgh should a woman take, https://ebra.ewaucu.us/index.php?page=user&action=pub_profile&id=473347,
2 iu hgh per day results
References:
how much hgh to take – https://ai-db.science/wiki/Ghrp2_10_Mg_Ghrp2_Peptide_Kaufen –
Whoa all kinds of excellent facts!
somatropinne hgh review
References:
hgh dosage for injury recovery (https://latenews.top/item/312348)
This site was… how do you say it? Relevant!! Finally I have
found something which helped me. Appreciate it!
how much hgh should i take a day
References:
side effects of Hgh injections, http://xn—-8sbec1b1ad1ae2f.xn--90ais/user/breakformat8/,
Hmm is anyone else experiencing problems with the images on this blog loading?
I’m trying to determine if its a problem on my end or if it’s the blog.
Any suggestions would be greatly appreciated.
dianabol first cycle
References:
dianabol injection cycle (https://titu.dbv.ro/user/profile/345796)
deca dianabol test cycle
References:
test dianabol cycle (http://09vodostok.ru/user/eventmale15/)
test deca dianabol cycle
References:
Dianabol Steroid Cycle – https://lovewiki.faith/wiki/Dbol_Cycle_Information_To_Stacking_Dosages_And_Unwanted_Effects –
dianabol cycle reddit
References:
Dianabol Deca cycle – https://xn—-7sbarohhk4a0dxb3c.xn--p1ai/user/liverscent4/,
hi!,I really like your writing so a lot! proportion we keep up a
correspondence more about your article on AOL? I require an expert on this area to
solve my problem. May be that’s you! Having a look forward to peer you.
Good post. I certainly appreciate this website. Thanks!
what is considered a high roller at a casino
References:
High Roller Online Casino (https://rotatewhale04.werite.net/huge-limits-greater-wins)
casino
References:
what is a high roller (https://heavenarticle.com/author/randomberet19-275510/)
high roller players
References:
game of spades (https://peatix.com/user/27503414)
Your style is unique compared to other people I have read
stuff from. Thanks for posting when you have the opportunity, Guess I will just book mark this web site.
Link exchange is nothing else however it is only placing the other
person’s blog link on your page at appropriate place and other person will
also do similar in favor of you.
We live in a time when most cars are pretty good, and lots are pretty great. The days of cars that would rattle apart as you drove, and radio knobs that would come off in your hand, and missing engine pieces seem to be behind us. But in putting together a list of the worst cars of the 20th century, spanning the hundred years when cars and car companies were still trying to find themselves and Americans were desperate to own whatever had four wheels and an engine, you realize the wondrous wealth of choices there are for truly crappy cars. You kind of have to give the very early years a pass, since every car on the road was an experiment, and every buyer the lab rat. But by the 1950s, the cars should have been pretty good. But take a look at this list — a third of the cars come from that decade alone.
My page … http://malingshu.site:6010/everettehowart
HOW I WAS CURED FROM HERPES SIMPLEX (HSV1&2)
Living with Herpes simplex was depression for me even with my doctor’s advice and medication. My name is Gina Lawson I live in Chicago, Illinois and this is my story. I browsed the Internet in search of remedies or something but unfortunately nothing new, all still had the same results. Sadly I almost quit on myself, it was around 7:30 in the morning when my therapist called me over to her house, at first I was skeptical, but I went anyways on getting there she was smiling and said there’s living proof now, she showed me a lady who also suffered from herpes simplex 3years back and now she is cured by a doctor who also studied natural herbs. I was amazed and lost for words I even doubted but showed me a doctor’s report test. So I contacted the doctor and weeks later, I was cured. So I would love to use this medium to say a big thank you to my therapist and Dr. Chalopa. This story is shared to others like me out there. However, he also treats other illnesses. Reach him via Email: drchalopa@gmail.com / WhatsApp +2348139677355
I’m impressed, I must say. Rarely do I come across a blog that’s equally educative and entertaining, and without a doubt,
you’ve hit the nail on the head. The problem is something that too few people are
speaking intelligently about. Now i’m very happy that I came across this in my search for something
concerning this.
Thankfulness to my father who told me regarding this web site, this web site is in fact remarkable.
Have you ever considered about including a little bit more than just your
articles? I mean, what you say is fundamental and everything.
However think about if you added some great graphics or videos to give your posts
more, “pop”! Your content is excellent but with pics and
clips, this blog could definitely be one of the
most beneficial in its niche. Wonderful blog!
Now I am going to do my breakfast, afterward having my
breakfast coming over again to read further news.
Valuable postings, With thanks!
Outstanding post but I was wanting to know if you could write a
litte more on this subject? I’d be very grateful if you could elaborate a
little bit further. Kudos!
steroids drug definition
References:
https://karmyogi.in/employer/androchem-laboratories-hgh-wachstumshormon-liquid-100iu-steroide-kaufen-in-deutschland/
Daten können hierzu zur Analyse Ihres Nutzerverhaltens verwendet werden, wie im Folgenden noch detailliert wird.
Unsere Radiologie steht ausschließlich unseren stationären Patienten zur Verügung. Die korrekte Darstellung der Webseite ist nicht garantiert und die Bedienung ist eingeschränkt bis hin zu nicht bedienbar. Damit Frau Verheyen sich auf Ihre persönlichen Wünsche einstellen kann, melden Sie sich vorab bitte per Email an ohrenklinik- für den jeweiligen Vortrag an. Mit der Anmeldebestätigung erhalten Sie im Anschluss auch den Zoom-Link zur Teilnahme. Das Berufsbild Beruflich Pflegende – Pflegefachfrauen und Pflegefachfmänner – betreuen und versorgen nach aktuellen pflegewissenschaftlichen Erkenntnissen selbstständig und umfassend kranke und pflegebedürftige Menschen aller Altersstufen in akut und dauerhaft stationären sowie ambulanten Pflegesituationen.
Um die Sicherheit Ihrer Daten zu gewährleisten, speichern wir personenbezogene Daten ausschließlich auf deutschen Servern, nutzen neueste technische Methoden zur Verschlüsselung der Daten und haben organisatorische Maßnahmen getroffen um sicherzustellen, dass die gesetzlichen Datenschutzvorschriften eingehalten werden. Der Sinn und Zweck der Web Site Klinikradar ist es, Ihnen fachlich fundierte Informationen, Hilfestellungen und konkrete Ratschläge zu Ihren spezifischen gesundheitlichen Herausforderungen automatisiert auszuspielen, mit dem Ziel Ihnen zu einer besseren medizinischen Behandlungen zu verhelfen. Die Erbringung dieses Mehrwerts für Sie wäre ohne die Erhebung und Verarbeitung personalisierter Daten nur sehr eingeschränkt möglich. Daher verarbeitet der Websitebetreiber personenbezogene Daten, um den genannten Zweck optimum zu erfüllen, ein ansprechendes Nutzererlebnis bieten zu können und um eine fehlerfreie Bereitstellung der Website zu gewährleisten.
Durch geeignete Maßnahmen tragen beruflich Pflegende zur Erhaltung, Förderung, Wiedererlangung oder Verbesserung der physischen und psychischen State Of Affairs der zu pflegenden Menschen bei, beraten sie und begleiten sie in allen Lebensphasen. Der Nutzung von im Rahmen der Impressumspflicht veröffentlichten Kontaktdaten zur Übersendung von nicht ausdrücklich angeforderter Werbung und Informationsmaterialien wird hiermit widersprochen. Die Betreiber der Seiten behalten sich ausdrücklich rechtliche Schritte im Falle der unverlangten Zusendung von Werbeinformationen, etwa durch Spam-E-Mails, vor.
References:
https://researchtweet.com/employer/online-arzt-rezept-ausstellen-%ef%b8%8f-medikamente-authorized-bestellen/
Es bietet eine umfassende Bildung, die die Grundlage für eine erfolgreiche Zukunft bildet. Das Helmholtz-Gymnasium Hilden ist eine herausragende Bildungseinrichtung, die sich durch ihr breites Angebot und ihre Barrierefreiheit auszeichnet. Die Schule befindet sich in Hilden, einer Stadt im Bundesland Nordrhein-Westfalen. Genauer gesagt, liegt das Gymnasium an der Adresse Am Holterhöfchen 30, Hilden, Deutschland. Unter den Links “Austausch Archiv” finden Sie Austauschprogramme und internationale Aktivitäten das HGH aus der Vergangenheit – wie beispielsweise den Austausch mit Israel. In einem rasanten Tempo ziehen Bauarbeiter momentan das neue Oberstufenzentrum des Helmholtz-Gymnasiums Hilden (HGH) hoch.
Die Grundmauern stehen bereits, nun werden Holzelemente eingebaut, die später die Klassen und anderen Räume abtrennen. Bis Anfang November sollen alle Wände stehen, auch die im Obergeschoss, das momentan noch nicht existiert. Danach wird die Glasfassade innerhalb von drei bis vier Wochen eingebaut. Dienstags und freitags bieten Musikschule, Sportvereine und andere außerschulische Kooperationspartner Arbeitsgemeinschaften an.
Experimentalfilme aus den Literaturkursen der Oberstufe qualifizieren sich regelmäßig für die Auswahlliste des Schülerfilmfestivals NRW[12][13][14][15]. Die Ausbildung kann sowohl als Wahlpflichtfach als auch als außerunterrichtliche AG durchgeführt werden. Die Schüler sind nach Abschluss des 6–12 monatigen Kurses in der Lage, bei Verletzungen und Spontanerkrankungen im Schul- und Privatkreis helfen. 2010 feierte die Schule ihr hundertjähriges Bestehen[5]. Zum wiederholten Mal hat das in Zusammenarbeit mit dem Jugendparlament veranstaltete Pace Debating in der Aula des HGH stattgefunden.
Wir gratulieren ihr herzlich zu ihrem bisherigen Erfolg und drücken ihr für die nächste Wettbewerbsrunde fest die Daumen. Die ausführliche Einladung zu den beiden Veranstaltungen sowie genauere Informationen zu deren Ablauf erhalten Sie hier. Bitte beachten Sie, dass eine Teilnahme grundsätzlich nur mit einem der 3G – Nachweise möglich ist. Im Gebäude muss zudem eine Maske getragen werden.
Im Freizeitbereich werden außerdem AG, wie beispielsweise Fußball, Kraft und Standardtanz, angeboten. Darüber hinaus können die SchülerInnen regelmäßig bei den “Bundesjugendspielen” und schulinternen Turnieren teilnehmen. Jürgen hat das Password an alle bekannten email-Adressen unserer Mitschüler verschickt.
Nähere Infomationen dazu gibt es bei den Kontaktpersonen der einzelnen Schulen. Seit Jahren sind wir neben namhaften Unternehmen und Fachhochschulen erfolgreiche Aussteller am Düsseldorfer Tag der Technik. Helmholtz-Gymnasiums haben die Möglichkeit in der Oberstufe das Fach Sport auf Leistungskursniveau zu belegen.
Und die stehen an den Toren zum Schulgelände und spritzen jede Schülerin und jeden Schüler nass. Die Mensa ist an jedem Schultag sehr gut frequentiert und bietet ein vielfältiges Essensangebot. Es gibt zahlreiche Angebote an Kaltspeisen und verschiedene warme Mittagessen. Die Proben finden während der Schulzeit montags um 18 Uhr statt. Begabte Schüler können auf Antrag stundenweise vom Regelunterricht befreit werden, um in dieser Zeit unter individueller Begleitung einer Lehrkraft als Mentor eigenen Projekt- und Forschungsinteressen nachzugehen.
Und nicht nur das – die vier Spieler haben sogar alle ihre Partien gewonnen. Wir gratulieren ihr herzlich zu ihrem bisherigen Erfolg und drücken ihr für den Kreisentscheid in Heiligenhaus fest die Daumen. Wir haben nun etwas mehr Gewissheit hinsichtlich der Anmeldungen für das kommende Schuljahr und der Dinge, die wir in diesem Kontext dürfen und eben auch nicht dürfen. Im November haben wir mit viel Energie einen Corona-tauglichen Tag der offenen Tür für Sie und Ihre Kinder konzipiert, den viele von Ihnen auch besuchen wollten. Gehofft hatten wir bis zuletzt, dass wir diesen im Januar nachholen können. Leider dürfen wir diesen aus verständlichen Gründen nun auch nicht im Januar durchführen – diese Nachricht erreichte uns in der letzten Woche.
Die Bandbreite reicht von Werken klassischer Orchesterliteratur über Bearbeitungen von Filmmusik oder Musicalsongs. Entwicklung und Perfektionierung von Fahrzeugen für die Teilnahme an Schülerwettbewerben wie Mausefallenrennen, Wettbewerb der Modell-Solarmobile usw. Wilhelmine-Fliedner-Gesamtschule 53 Jugendliche der Fliedner treten in diesem Jahr zu den Abiturprüfungen an. Die meisten Arbeiten, 2001 gekrönt durch den Gewinn des Bundeswettbewerbes im Fach Chemie, gingen aus der legendären Chemie AG von Dr. Walther Enßlin hervor. “Töchter” dieser AG waren die AG “Detegimus Naturam” unter Leitung von Bernhard Osterwind und die AG “Technik-Physik” unter Leitung von Dr. Johann Pleschinger. An dem Wettbewerb ‘Jugend forscht’, das selbstständige, forschend entwickelnde Arbeiten von Schülerinnen und Schülern an der Schule fachlich begleitet und gefördert wird. “Urzellen” dieser Arbeit sind Groups aus Schülern und betreuendem Lehrer (z.T. auch ehemalige Lehrer wie Dr. Enßlin).
Die Bibliothek des Selbstlernzentrums und entsprechende Computerarbeitsplätze stehen zur Recherche zur Verfügung. Medienscouts sind Schülerinnen und Schüler, die anderen Schulteilnehmern Chancen und Risiken moderner Mediennutzung aufzeigen. Die Einrichtung ist ein Gymnasium mit einer langen Tradition und einem exzellenten Ruf. Das Helmholtz-Gymnasium Hilden ist ein Ort des Lernens, der individuellen Förderung und der Gemeinschaft.
References:
https://hatchingjobs.com/companies/hygetropin-kaufen-hgh-somatropin-progress-hormone-bestellen/
negatives bodybuilding
References:
https://huntapp.in/employer/hgh-somatropin-liquid-pen-90-iu-hilma-biocare-kaufen-preis-295-euro-online-in-deutschland/
where can i buy steroids for bodybuilding
References:
https://renbrook.co.uk/employer/hgh-on-line-kaufen-aus-der-apotheke/
Hinzu kommt eine besondere Expertise im Bereich Herzschrittmacher- und Defibrillator-Therapie. Im August 2018 wurde die Wirbelsäulenchirurgie als neue Hauptabteilung im HGH etabliert. Inzwischen ist die Bensheimer Wirbelsäulenchirurgie Teil des überregionalen Rhein-Neckar-Wirbelsäulenzentrums unter der Leitung von Dr. med. Mit Herrn Zümrüt als Standortverantwortlichen in der Wirbelsäule und der Kompetenz des Zentrums können sämtliche Erkrankungen des Rückens und der Wirbelsäule behandelt werden. Gemeinsam mit der Orthopädie, die seit Januar 2023 als neueste Hauptabteilung von Dr. med. Zisis Poulidis geleitet wird, und der Unfallchirurgie, bilden Neurochirurgie und Wirbelsäulenchirurgie seither das Zentrum für den Bewegungsapparat.
Es gibt einen vorbereitenden (propädeutischen) Kurs für den englisch gehaltenen Erdkundeunterricht in Klasse 6 und 7. In Klasse 8 wird auch Geschichte und in Klasse 9 und 10 Biologie auf Englisch unterrichtet. In der Oberstufe kann ein fünfstündiger Biologiekurs auf Englisch gewählt werden.
Deutlich zu reduzieren, legen wir höchsten Wert auf die Einhaltung der Hygienestandards sowie den gezielten und durchdachten Einsatz von Antibiotika. Wir verwenden modernste intensivmedizinische Behandlungsverfahren nach den aktuellen Empfehlungen der Fachgesellschaften. Unsere Intensivpflege stellt den Patienten in den Mittelpunkt und bindet die Angehörigen mit in den Behandlungsprozess ein. Hier ist uns eine enge Kooperation zwischen dem Ärzteteam und den Angehörigen sehr wichtig, um den besten Therapieverlauf für unsere Patienten zu gewährleisten. Wir nehmen uns die Zeit diese in einem persönlichen Gespräch zu erörtern. Der Wechsel an den Langstreckenstützpunkt zu Bundestrainer Bernd Berkhahn erwies sich dann als goldrichtig für Gose.
Zu Beginn des Jahres 2016 steckte das Haus tief in den roten Zahlen. Zahlreiche Stationen mussten geschlossen werden und das HGH stand kurz vor der Schließung. Erst mit der Übernahme durch die Artemed Gruppe im Juli 2016 ging es wieder bergauf. Das HGH1-Team erreichte einen Sieg, das HGH2-Team erzielte ebenfalls einen Sieg.
Ihren persönlichen Verwendungszweck für die Rückmeldung finden Sie in Ihrem heiCO-Account unter „Studienbeitragsstatus”. Bei besonderen Großereignissen, wie zum Beispiel der Sonnenfinsternis im März 2015 oder der Mondfinsternis im September 2015 öffnen wir das ALZ für eine breite Öffentlichkeit. Aufgabe und Ziel des ALZ ist es, Schülerinnen und Schülern und allen anderen Besuchern über die verschiedenen Kontexte einen Zugang zur Astronomie und zu den Naturwissenschaften zu ermöglichen.
Da keine Nachfolge für den in den Ruhestand gehenden Belegarzt Dr. Rolf Schwabenland gefunden werden konnte, musste die Bensheimer Geburtshilfe schließen. Im April 2021 wurde jedoch eine neue gynäkologische Hauptabteilung unter dem Chefärztinnen-Tandem aus Dr. med. Der Fokus der Abteilung liegt auf der minimal-invasiven gynäkologischen Chirurgie sowie auf der Behandlung von Inkontinenz- und Senkungsbeschwerden. Ebenfalls seit April 2021 verfügt das Heilig-Geist Hospital über eine neue Abteilung für Hals-Nasen-Ohrenheilkunde. Karl Hörmann übernimmt die Funktion des Ärztlichen Direktors und leitet das im Mai 2021 eröffnete Schlaflabor, Dr. med. Jérôme Servais begleitet die Chefarzt-Position der neuen HNO-Abteilung und leitet die Ohrenklinik.
“Ich habe natürlich die Ergebnisse der Konkurrenz verfolgt und vielleicht ist über die eine oder andere Strecke oder auch mit der Staffel das Finale drin”, erklärt Gose im Interview in der kommenden Sommerausgabe des swimsportMagazine. “Es wäre natürlich ein Spotlight in einem Olympischen Finale schwimmen zu dürfen und sich dort mit den Besten der Besten zu messen.” Das Helmholtz-Gymnasium ist eines von 97 Gymnasien in Baden-Württemberg mit Deutsch-Englischer Abteilung. Motivierte und besonders begabte Schülerinnen und Schüler können an unserer Schule am bilingualen Unterricht bzw. An CLIL – Content and Language Built-in Learning – teilnehmen. Moodle ist an der Universität Heidelberg nicht mehr wegzudenken.
Am Ende gibt es ein Bilingual-Zertifikat oder das internationale Abitur Baden-Württemberg. „Keinem gönnt man es mehr als Isa”, sagte Lukas Märtens später, nachdem er selbst ins 200-Meter-Rückenfinale eingezogen warfare. Märtens ist nicht nur frischer Olympiasieger, sondern auch Trainingskollege von Gose – und ihr Ex-Freund. Es ist eine ziemlich charmante Dreiecksbeziehung, die sich da jetzt entwickelt hat in Magdeburg. Denn einerseits sind Gose und Märtens schon seit dem vergangenen Sommer kein Paar mehr, zugleich verstehen sie sich aber intestine – und Märtens’ Schwester Leonie hat einen ganz hervorragenden Draht zu Gose. Im Finale schwammen sie übrigens beide, Leonie Märtens wurde als Jüngste des Rennens Achte. Auch in der Mittelstufe könnt ihr natürlich weiterhin an der Theater-AG teilnehmen oder das Interesse am Theaterspielen neu für euch entdecken.
References:
https://corevacancies.com/employer/wachstumshormone-hgh-somatropin-kaufen/
Very shortly this website will be famous amid all blogging people, due to it’s good posts
casino queen st louis
References:
palm springs casinos (https://guardian.ge/68554-us-joins-germany-in-sending-battle-tanks-to-ukraine.html)
wheeling wv casino
References:
hard rock casino hollywood – https://community.theclearwaytoconceive.com/question/a-journey-back-in-time-what-people-talked-about-legal-drivers-license-online-20-years-ago/,
aspers casino northampton
References:
casino san pablo (https://paramedical.sureshinternationalcollege.in/advanced-diploma-in-rehabilitation-psychology/)
blackjack odds
References:
seven feathers casino oregon – https://streetwiseworld.com.ng/2022/09/04/fidelity-bank-begins-international-expansion-drive/ –
nba games tonight
References:
http://guardian.ge/67334-markets-up-after-bank-of-england-bond-buying-pledge.html
If some one wants expert view regarding blogging after that i suggest him/her to visit this blog,
Keep up the good job.
Having read this I thought it was rather enlightening.
I appreciate you finding the time and effort to put
this informative article together. I once again find
myself spending a significant amount of time both reading and posting comments.
But so what, it was still worth it!
It is overall efficient to take and make good well being. But, the very best evaluations of the CBD system are given here. Make good digestion and metabolism. 😍🎀Order StaminUp Gummies UK Today! CBD, or cannabidiol, is a compound throughout the marijuana plant. While its higher-identified cousin, THC (tetrahydrocannabinol), is psychoactive and will make you “high,” CBD isn’t. Instead, in keeping with research, CBD impacts the body’s endocannabinoid system (ECS) to modulate an enormous vary of processes, from mood and sleep to starvation and immune response. What Sets Terra Pro CBD Gummies Apart Terra Pro CBD Gummies have excessive-quality, full-spectrum CBD oil from hemp. It is a principle that the effect of a mix of cannabinoids is larger than the impact of remoted cannabinoids. Most individuals use CBD because of its soothing properties. Because the analysis continues, there are indications that CBD may reduce stress and anxiety ranges, which might be a remedy for individuals who don’t reply to the usual remedy.
My web blog https://fairwayturfsouthjersey.com/choosing-the-best-artificial-turf-installation-service
CBD: the most well-liked well being product around? The recognition of CBD products has grown enormously the final couple of years. The compound CBD, short for cannabidiol, is without doubt one of the substances which are extracted from leaves and flower tops of hemp. CBD is sold as a dietary complement and comes in many types, including oil, capsules, crystals, pores and skin care products and even food. And while many of the health claims concerning CBD haven’t been scientifically proven yet (or accredited by certain food administrations), customers of the merchandise declare it helps them in a wide variety of bodily and mental issues, with some examples being stress-related complaints, problems with falling asleep and temper changes. What are the results of CBD? If you utilize CBD, you won’t get excessive or stoned. It’s possible you’ll feel a little lightheaded, however not everyone is affected in this way. Most individuals merely really feel relaxed. CBD is used for various ailments however works in another way for everyone.
Feel free to surf to my blog post – https://calpg.cz/plyn-do-aut-trha-rekordy/
Flavored and colored with pure plant-based mostly sources, these gummies are USDA certified natural. “As with the Bliss https://www.kayrana.com/decorating-and-furnishing-small-spaces/ oil, the Tropical flavor gummies include hempy undertones. “I took the product for stress relief, to assist me chill out after work. I also noticed that if I took it later within the evening (say 8 or 9 pm) that it helped me fall asleep. “I examined a brand new formulation of this gummy in 2024. It has much less of a hempy flavor, and is coated in sugar. “I felt the effects about an hour after I took the CBD. These results had been extra intense than other gummies that I’ve tried. I felt just a little fuzzy and barely high, I’d say. “As with the Bliss CBD oil, the Tropical taste gummies come with hempy undertones. “I took the product for stress relief, to assist me relax after work. I additionally seen that if I took it later in the night (say eight or 9 pm) that it helped me fall asleep.
Low Carb Keto Cereal is the factor I missed most after i began keto. So I made a keto-friendly version, and i like it! Since starting the keto weight loss plan, I’ve been dying for cereal with chilly milk. Eating scorching breakfasts day by day looks as if a dream, however sometimes you want one thing chilly and as far away from eggs as potential! As I’ve talked about, my total family lives the keto life-style, so egg-styled breakfasts get previous to children who’re used to gorging themselves on carbs every morning. They miss cereal, pop-tarts, and granola bars. They are used to consuming chilly and quick breakfasts they could make themselves. This super simple low-carb keto cereal is a brand new family favourite. It’s really easy to make that the older kids now supply to fix it for the little ones if I’m not ready to get out of mattress (also a plus). 1. Mix the whole lot in a bowl and pour chilled coconut milk over it. You can go crazy with this and do whatever you need. The possibilities are endless, so get artistic! As you’re probably effectively conscious, constipation will be a problem when beginning the keto eating regimen, so this cereal is the perfect solution to get more fiber! I can’t tell you what number of messages I have gotten from folks who’ve tried this recipe, and thankfully, everybody loves it. So in the event you haven’t put away the eggs yet, get to it as a result of it’s good to try this recipe. If you’re frightened about including fruit to your eating regimen, skip the strawberries. Once you attain your objective, you possibly can always strive it again with fresh berries. Best low carb cereal around. That is my favorite keto breakfast meals.
Look at my web page: https://rentry.co/32565-case-study-exploring-the-effectiveness-of-supra-keto-for-weight-loss
This is the perfect site for everyone who hopes to understand this topic.
You realize a whole lot its almost tough to argue with you
(not that I personally will need to…HaHa).
You definitely put a brand new spin on a topic which has been discussed for ages.
Great stuff, just excellent!
Hey! This is my first comment here so I just wanted to give a quick shout out and tell you I
really enjoy reading through your blog posts. Can you recommend any other blogs/websites/forums that go over the
same subjects? Thanks a ton!
Hmm is anyone else encountering problems with the images on this blog loading?
I’m trying to find out if its a problem on my end or if it’s
the blog. Any feed-back would be greatly appreciated.
Excellent blog you’ve got here.. It’s difficult to find quality writing like yours nowadays.
I really appreciate individuals like you! Take care!!
non steroid muscle builder
References:
https://talukadapoli.com/travel/listing/durvankur-cottage/
why do anabolic steroids differ from other illegal drugs
References:
https://bitpoll.de/poll/pwfl-freiwellegenlescht-european-champ/
Its like you learn my mind! You appear to know so
much about this, like you wrote the ebook in it or something.
I think that you just can do with some p.c. to pressure
the message home a bit, however other than that, this is excellent blog.
A great read. I will certainly be back.
another name for physiological risk is safety risk.
References:
https://dreamtripvegas.com/exploring-hidden-gems-off-the-vegas-strip/
effects of prolonged steroid use on the human body
References:
https://jayalda.pinoyseo.net/snowboarding-what-no-one-is-talking-about/
different types of testosterone steroids
References:
https://paramedical.sureshinternationalcollege.in/diploma-in-veena/
Admiring the time and energy you put into your blog and detailed information you provide.
It’s great to come across a blog every once in a while
that isn’t the same old rehashed information. Wonderful read!
I’ve saved your site and I’m including your RSS feeds to my Google
account.
expekt casino
References:
hard rock casino tampa fl (https://office-nko.ru/dwqa-question/okazanie-uslugi-socialnoe-taksi/)
south park player
References:
http://pups.org.rs/2012/04/23/izbori-2012-dr-jovan-krkobabic-u-pancevu-koalicija-sps-pups-js/
progressive slots
References:
caesars palace las vegas (https://fashiontrendlook.com/2025/04/24/spring-summer-2024-color-trends-whats-in-whats-out/)
hollywood casino joliet il
References:
https://paramedical.sureshinternationalcollege.in/diploma-in-poultry-pharmaceutical-salesmanship/
crown casino melbourne accommodation
References:
casino acura (https://www.giuliavirgara.com/cool-gallery-portfolio-templates/)
money gaming
References:
https://mcm999.fun/the-importance-of-building-a-strong-brand-identity/
blackjacks elgin
References:
https://bbtphbanyumas.distanbun.jatengprov.go.id/koordinasi-kegiatan-perbanyakan-benih-padi-dan-kedelai-di-awal-pertanaman?kpage=65
When I originally commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I get three emails with the same comment.
Is there any way you can remove people from that
service? Cheers!
For those committed to pure health options and constant supplementation, Glyco Forte affords a promising path toward better glucose control and enhanced metabolic wellness. The Glyco Forte money-back guarantee additional reduces any threat, making it a worthwhile consideration for anyone severe about managing their blood sugar naturally. Remember, whereas Glyco Forte Glucose Management could be a superb device in your well being arsenal, it really works best when mixed with a healthy weight loss program, regular exercise, and ongoing communication together with your healthcare provider. This https://funsilo.date/wiki/User:MaurineHarrison Forte Review concludes that the supplement delivers on its guarantees and provides genuine worth for those seeking natural blood sugar management options. Zou, H., Zhang, X., Chen, W. et al. Vascular endothelium is the essential approach for stem cells to treat erectile dysfunction: a bibliometric study. Clinical study on a botanical compound showing important discount in diabetes sort 2 symptoms and blood glucose. J Diabetes Metab Disord. Zaborska, K.E., et al. Deoxycholic acid supplementation impairs glucose homeostasis and insulin signaling in mice. Giri, B., et al. Chronic hyperglycemia mediated physiological alteration and metabolic distortion results in organ dysfunction, infection, most cancers development and other pathophysiological consequences: An replace on glucose toxicity. Review of grapefruit’s results on blood sugar and diabetes administration.
CBD has anti-inflammatory qualities that will calm the skin and lessen the discomfort related to a number of pores and skin diseases. In the event you continuously experience anxiety or tension, you may also profit from CBD in your therapeutic massage oil. It relaxes your thoughts and physique and encourages you to put your troubles out of your thoughts and deal with the present. How to decide on the best CBD Oil for Massage? Using CBD massage oil improves the therapeutic massage. Oil with CBD will be applied on to painful joints or muscles. When you choose how to use splendid CBD therapeutic massage oil in your needs, take under consideration the next components: CBD dosage (the amount of CBD in a product could determine how well it really works for an individual.) THC content (a person could choose to use THC-free products.) Certificate of analysis. You should look on the COA of a product supplied by impartial laboratories to verify for impurities and correct CBD and THC amounts. Where to buy CBD Massage Oils Near Me? Because CBD therapeutic massage oil products are a good possibility for self-care, you may find them at pharmacies and beauty shops. Also, dedicated CBD retailers provide a wide range of self-care products. Of course, some CBD massage oils are within the dispensaries near your own home. Try purchasing CBD massage oil from the shops’ and firms web sites. By buying online, you will have a better probability to read buyer opinions, consider pricing, or even take full benefit of sales promotions.
Here is my webpage: https://www.tropicswriter.nl/ivoorkust/vrijdag-pagnedag/
These chocolates are specific because of their excellent elements and cautious composition; nonetheless, they function great when included in a complete fitness regimen. As with every supplement, when you will have health points or are on medicine, communicate together with your medical physician. What are Terra Pro CBD Gummies? Terra Pro CBD Gummies are legal in the majority of states, contemplating they include CBD derived from hemp with less than 0.3% THC. Checking your neighbourhood authorized guidelines is a good concept, though restrictions vary relying on the place you live. Will I get excessive from Terra Pro CBD Gummies? No, you won’t get excessive from Terra Pro CBD. Instead of THC (or less than 0.Three% % THC), which is the substance that offers hashish its intoxicating results, they contain CBD. How lengthy does it take the Terra Pro CBD Gummies to start out working? Effects sometimes start to happen 30 to ninety minutes after ingestion. Depending on non-public factors like metabolic processes, whether or not or not you’ve eaten, and the way your physique reacts to CBD, this length can range. Are these gummies safe to eat while pregnant? Using https://preahthortesna.com/?p=17671 products at the same time as pregnant or nursing is discouraged using the FDA. During these cases, you might be often trying to find suggestions out of your healthcare provider. For explicit troubles like pain or anxiety, how shortly can I anticipate peer penalties? While some customers experience benefits instantly, others see upgrades steadily over 1 to 2 weeks of bizarre use. Chronic issues like non-cease aches and pains might also take longer to treatment than acute ones like situational anxiety.
Wow that was strange. I just wrote an incredibly
long comment but after I clicked submit my comment didn’t
show up. Grrrr… well I’m not writing all that over again. Anyhow,
just wanted to say excellent blog!
mini roulette
References:
https://joyeriasvanessa.com/product/pulsera-de-identificacion-de-chevron/
casino sacramento
References:
https://mysys.pt/2022/06/21/hello-world/comment-page-1094/
wheeling wv casino
References:
https://projetocimm.com/mammom/
casino flash
References:
https://guardian.ge/27409-chinese-president-speaks-with-trump-and-urges-calm-over-north-korea.html
casinos online
References:
https://www.trefpuntstan.be/ontmoet-deel/deel-je-verhaal-detail-pagina/2022/10/13/Inclusief-onderwijs-Opinie-van-Stijn-Kerkhofs
bet365 casino mobile
References:
https://paramedical.sureshinternationalcollege.in/jewellery-appraiser/
buy real steroids online
References:
https://artificialintelligence.biz.id/5-ai-ethics-in-corporate-world.html/
steroid that starts with d
References:
https://vaserco.com/lorem-ipsum-dolor-sit-amet/
when did anabolic steroids become illegal
References:
http://www.ilovegreatwall.cn/public/gwwx.php?action=view&id=847&mode=www
best legal supplement to build muscle
References:
https://aliah.dawah.in/question/ai-tools-3/
We have been helping Canadians Borrow Money Against Their Car Title Since
March 2009 and are among the very few Completely Online Lenders in Canada.
With us you can obtain a Loan Online from anywhere in Canada as
long as you have a Fully Paid Off Vehicle that is 8 Years old or newer.
We look forward to meeting all your financial needs.
With an emphasis on high quality and efficacy, Glyco Forte is produced below stringent manufacturing processes to make sure that each ingredient retains its potency and bioavailability. This commitment to excellence makes it a reliable selection for those searching for to reinforce their well being naturally. As we discover the varied parts and benefits of Glyco Forte, it turns into clear that this supplement is not just another product in the marketplace, however fairly a thoughtfully designed ally within the journey toward improved health and effectively-being. Does Glyco Forte Blood Sugar Work? The effectiveness of Glyco Forte Blood Sugar is anchored in its rigorously chosen elements, each of which has been studied for its potential function in blood sugar regulation. Users usually report optimistic outcomes, including improved glycemic management, diminished insulin resistance, and enhanced overall metabolic function. Clinical research have demonstrated the person advantages of the first ingredients found in Glyco Forte, equivalent to berberine and gymnema sylvestre, both of which have been related to important reductions in fasting blood https://git.jerl.dev/kristanbrendel levels and enhancements in insulin sensitivity.
Hello! Would you mind if I share your blog with my myspace
group? There’s a lot of people that I think would really enjoy your content.
Please let me know. Thanks
I read this piece of writing completely about the
comparison of most up-to-date and preceding technologies,
it’s amazing article.
days inn clifton hill casino
References:
https://musicandsky.com/speaker-marcia-ann-v-1-ms-2024/
diamond jacks casino
References:
https://admin.dnn.mn/wp/uilchilgeenii-gavyaat-ajiltan-ts-l-r-shagnuullaa/
You explained this terrifically!
Also visit my homepage; https://nefertaricompany.com/ar/%d9%85%d9%82%d8%a7%d8%b3-%d8%a7%d9%84%d9%85%d9%84%d8%b9%d8%a8-%d8%a7%d9%84%d8%ae%d9%85%d8%a7%d8%b3%d9%8a/
Thank you for some other great article. The place else may anybody get that kind of info in such a perfect
method of writing? I’ve a presentation subsequent week, and I am on the search for such
information.
This application helps you design and open your own minimal without any weird
coding skills. Judge the blockchain, crowd up sign parameters, add liquidity, and activate an automated trading bot!
Smackdown
The web site is user pleasant, you still really must focus to the amount of options, particularly for successive orders, each time a summary of the acquisition isn’t any more exhibited. The solutions are exactly as defined on the web site, subsequently of excellent quality. I had sleeping drawback on account of my neck pain. So thought of certainly one of my advised me this resolution. I simply requested only one and imagined will it is precious. In case you have any extra issues or questions, be sure you Won’t be reluctant to Get in contact with us at . Our assist crew is usually readily out there to help you. Thanks to your beneficial comments about the Derila Memory Foam https://bavaria-munchen.com/goto.php?url=http://honorgaming.free.fr/forums/profile.php?id=14031. We’re pleased to hearken to that you just uncovered the examples and knowledge sensible. Our goal is to supply a cushty and supportive selection for people with neck challenges, so we are thrilled that you just see the worth in our merchandise.
play casino games
References:
https://elitepropertiescr.com/property/independent-house-in-condominium-for-sale-belen
gsn slots
References:
http://www.monagas.gob.ve/?p=18423
roulette layout
References:
https://chemicalresearchinsight.com/2025/01/27/serine-for-cosmetics-market-global-outlook-and-forecast-2025-2032/
I do trust all of the ideas you have offered in your
post. They’re very convincing and will definitely work.
Nonetheless, the posts are very short for beginners. Could you please lengthen them a little
from next time? Thanks for the post.
https://mymedicalshop365.top/prednisone-tablets/
Prednisone is not a painkiller but can help reduce pain caused by inflammation. It is often used in conditions like rheumatoid arthritis or severe allergic reactions to reduce swelling and pain indirectly.
Excellent weblog here! Also your site rather a lot up very fast! What host are you the use of? Can I am getting your affiliate hyperlink to your host? I desire my site loaded up as fast as yours lol
Thanks for another informative blog. Where else may just I am getting
that kind of information written in such an ideal approach?
I’ve a mission that I’m just now working on, and I have been at the glance out for
such information.
You actually explained this fantastically.
Here is my blog – http://demos-internet.ru/bitrix/rk.php?goto=https://www.harbindra.com/17447/exploring-the-benefits-of-prime-boost-enhancement
At this moment I am ready to do my breakfast, after
having my breakfast coming over again to read further news.
Its such as you learn my thoughts! You appear to understand a lot about this, such as you wrote the guide in it or something.
I feel that you can do with a few p.c. to pressure the message house a little bit,
but other than that, this is magnificent blog.
A great read. I will definitely be back.
https://shop24go.store
Prednisone is often prescribed as part of a tapering schedule. This means the dose is gradually reduced over time to allow the body’s adrenal glands to resume normal cortisol production. Skipping tapering can lead to withdrawal symptoms and adrenal crisis.
Hi there! This blog post could not be written much better!
Looking through this article reminds me of my previous roommate!
He constantly kept preaching about this. I will send this article to him.
Fairly certain he will have a very good read.
Thank you for sharing!
Simply wish to say your article is as astounding. The clarity in your post
is simply excellent and i can assume you are an expert on this subject.
Well with your permission let me to grab your RSS feed to
keep up to date with forthcoming post. Thanks
a million and please carry on the rewarding work.
Hello very nice site!! Man .. Beautiful .. Amazing .. I will bookmark your
website and take the feeds additionally? I’m satisfied to find a lot of
helpful info here in the publish, we want work out extra strategies in this regard, thank you for
sharing. . . . . .
Admiring the time and effort you put into your blog and
detailed information you provide. It’s nice to come across a blog every once in a while that isn’t
the same out of date rehashed material. Excellent read!
I’ve bookmarked your site and I’m adding your RSS feeds to my Google account.
Right now it looks like WordPress is the preferred blogging platform available right now.
(from what I’ve read) Is that what you’re using on your blog?
Great blog here! Also your web site loads up very fast! What host are you using?
Can I get your affiliate link to your host? I wish my website loaded up as
quickly as yours lol
Can I simply say what a comfort to find somebody who really
knows what they are talking about over the internet.
You definitely realize how to bring an issue to light
and make it important. More people must look at this
and understand this side of the story. It’s surprising you aren’t more popular given that you certainly possess the gift.
Đừng để bị lừa verminsupreme.com scam verminsupreme.com bán thông tin người dùng
Useful information. Lucky me I discovered your web site by
chance, and I am shocked why this twist of fate didn’t happened in advance!
I bookmarked it.
May I simply say what a comfort to find someone who actually understands
what they are discussing over the internet. You certainly realize
how to bring an issue to light and make it important.
A lot more people need to check this out and understand this side of
the story. I was surprised you aren’t more popular because you certainly possess the gift.
70918248
References:
http://guardian.ge/48328-turkey-syria-offensive-some-us-troops-to-stay-says-trump.html
Awesome! Its in fact amazing piece of writing, I have
got much clear idea on the topic of from this paragraph.
Live dealer games make me feel like I’m there.
Feel free to surf to my webpage; https://jaredwuoi82593.blogadvize.com/43532728/reel-in-massive-jackpots-with-our-fishing-frenzy-slot
70918248
References:
safe steriods – https://laundryons.com/2022/05/26/will-digital-marketing-ever-rule/ –
70918248
References:
https://community.theclearwaytoconceive.com/question/to-moze-wystapic-to-you-kredyt-hipoteczny-i-gotowkowy-errors-to-keep-away-from/
I know this web page presents quality based articles or reviews and additional information, is there any other web site
which presents these stuff in quality?
70918248
References:
Gnc supplements With steroids (http://pups.org.rs/2011/12/22/probudjena-palilula-novo-rukovodstvo-pups-a-na-opstini-palilula/)
Thanks on your marvelous posting! I certainly enjoyed reading
it, you may be a great author.I will ensure that
I bookmark your blog and will come back at some point.
I want to encourage one to continue your great work, have a nice morning!
Hey there! Do you use Twitter? I’d like to follow you if
that would be okay. I’m undoubtedly enjoying your blog and look forward to new updates.
Do you mind if I quote a couple of your posts as long as I provide credit and sources
back to your website? My blog is in the exact
same niche as yours and my users would really benefit from a lot of the information you provide here.
Please let me know if this ok with you. Thanks!
What’s up, yup this post is actually pleasant and I have learned lot of things from it about blogging.
thanks.
Heya i’m for the first time here. I found this board and
I find It truly useful & it helped me out much. I hope to give something back and help others like you
helped me.
Excellent way of telling, and nice article to take data regarding my presentation topic, which i am
going to present in institution of higher education.
Unquestionably believe that which you stated.
Your favorite justification appeared to be on the web the easiest thing to be aware of.
I say to you, I certainly get annoyed while people think about
worries that they plainly don’t know about.
You managed to hit the nail upon the top as well as defined out the whole thing without having side-effects , people could take
a signal. Will likely be back to get more.
Thanks
With its straightforward in999 login, regular updates, and easy-to-use interface, it’s no surprise that the platform continues to see strong
user engagement.
You are so interesting! I don’t believe I’ve read through
something like this before. So good to find somebody with some genuine thoughts
on this subject matter. Seriously.. thank you for starting this up.
This website is something that’s needed on the internet, someone with some
originality!
If you are going for most excellent contents like I do,
just go to see this website daily as it provides feature contents, thanks
I don’t even know the way I stopped up right here,
however I assumed this post was once great. I don’t know who you
are however definitely you’re going to a famous blogger if you are not already.
Cheers!
Appreciate the recommendation. Will try it out.
Ouvrez simplement votre navigateur (Chrome/Safari), visitez notre site, collez le lien de la vidéo
et téléchargez.
We are a group of volunteers and starting a new scheme in our
community. Your site offered us with valuable info to work on.
You have done an impressive job and our whole community will
be grateful to you.
Aw, this was an incredibly good post. Finding the time
and actual effort to generate a good article…
but what can I say… I put things off a whole lot and don’t manage to get anything done.
Hi, Neat post. There’s a problem with your web site in web explorer,
may check this? IE nonetheless is the marketplace chief and a big section of folks will leave out
your great writing because of this problem.
Catharines hospital site has tested constructive. Practicing since September 2010, he is a founder member of SIDS Hospital and serves as a consultant in gastrosurgery department. Anthony has been serving the wants of Central Oklahoma.
This site was… how do you say it? Relevant!! Finally I have found something that helped me.
Thanks a lot!
Howdy! I could have sworn I’ve been to this website before but after browsing through many of
the articles I realized it’s new to me. Anyways,
I’m definitely pleased I stumbled upon it and I’ll be bookmarking it
and checking back often!
I am genuinely delighted to read this webpage posts which includes plenty of
helpful data, thanks for providing these kinds of information.
I already gave up on ever getting cured of HSV2 because i have try many treatment none of them worked out for me i have gone to different hospital they always tell me the same thing there is no cure for herpes, when i came across a post about Dr OGBAJI in the net from a lady called Angela i contacted her and she reassured me with his herbal medicine which i took according to the way he instructed, that how i was cured. I doubted at first because i have been to a whole lot of reputable doctors, tried a lot of medicines but none was able to cure me. so i decided to listen to him and he commenced treatment, and under two weeks i was totally free from Herpes. i want to say a very big thank you to DR OGBAJI for what he has done in my life. feel free to leave him a message on Whats-app him +2348089047155. EMAIL:drogbaji19@gmail.com. he cures all this 1.HIV 2.HPV 3.ALS 4.BED WETTING 5.DIABETES 6.CANCER 7.ARTHRITIS 8.RHUEMATISM 9.DEMENTIA 10.ALZHEIMER
Howdy! I just wish to offer you a huge thumbs up for your great info
you have right here on this post. I’ll be returning to your web site
for more soon.
I am genuinely thankful to the owner of this website who has shared this wonderful post at at this place.
Thanks for ones marvelous posting! I certainly enjoyed reading
it, you can be a great author. I will be sure to bookmark your
blog and will come back in the foreseeable future.
I want to encourage yourself to continue your great posts,
have a nice afternoon!
70918248
References:
why do doctors Prescribe steroids (https://newsstroy.kharkiv.ua/elektromobili-iz-kitaya-pochemu-oni-populyarny-v-ukraine.html)
Excellent website. A lot of useful information here.
I am sending it to some friends ans also sharing in delicious.
And obviously, thanks in your effort!
Currently it seems like Movable Type is the top blogging platform available
right now. (from what I’ve read) Is that what you’re using on your blog?
Bookmarked and recommended this to my friends who play at quotex too
— solid post!
Quotex broker
You’ve made some decent points there. I looked on the internet for more information about
the issue and found most people will go along with your views on this site.
Feel free to surf to my blog: what is the pink salt trick diet
Seriously plenty of good information. https://angel357.com
70918248
References:
Danger Of Steroids – https://www.glocalweb.in/products/waterproof-rubberized-seal-sealant-repair-tape/ –
70918248
References:
legal steroids uk (https://digitalteachers.co.ug/describe-the-social-and-economic-organization-of-galla-during-the-first-half-of-the-19th-century/)
It’s difficult to find well-informed people on this topic, however,
you seem like you know what you’re talking about! Thanks
70918248
References:
best steroids for muscle gain and fat loss (https://makutu.ru/news/magiya-run-drevnie-simvoly-i-ikh-sila/)
70918248
References:
anabolic steroids Pros and cons (https://aurousseauarchitecte.com/portfolio/transformation-dun-batiment-agricole-en-habitation-2/)
Hello there! I know this is somewhat off topic but I was wondering if you knew where I could get a captcha plugin for my
comment form? I’m using the same blog platform as yours and I’m having problems
finding one? Thanks a lot!
I’m not sure exactly why but this website is loading
extremely slow for me. Is anyone else having this issue or
is it a problem on my end? I’ll check back later on and see
if the problem still exists.
70918248
References:
how to gain muscle without steroids (https://88daga.com/xem-da-ga-thomo-cpc3-campuchia-ngay-13-08-2024-truc-tiep-va-tong-hop/)
70918248
References:
best steroids to get big fast (https://jdemeta.net/2018/07/12/applied-ballardianism-review-a-manual-for-the-present/)
I do accept as true with all of the ideas you’ve introduced
in your post. They are really convincing and will definitely
work. Still, the posts are too brief for newbies. May you please prolong them a
bit from subsequent time? Thanks for the post.
Hurrah! At last I got a blog from where I be able to truly take helpful information regarding my study and knowledge.
Link exchange is nothing else except it is simply
placing the other person’s weblog link on your page at suitable
place and other person will also do similar for you.
I needed to thank you for this good read!! I absolutely
loved every little bit of it. I have you saved as a favorite to check out new things you post…
I always spent my half an hour to read this web site’s posts all the time along with a
mug of coffee.
Hi there friends, how is the whole thing, and what you wish for to say on the topic of this paragraph, in my view its actually remarkable in favor of me.
Pretty section of content. I just stumbled upon your weblog and in accession capital to assert that
I get in fact enjoyed account your blog posts. Anyway I’ll be subscribing to your feeds and even I achievement you access consistently
fast.
Hi there to all, how is the whole thing, I think every one is getting more from this website, and your views are fastidious for new
visitors.
fast lean pro buy I started taking Fast Lean Pro after a buddy recommended it, and I’m so thankful I did.
This supplement has assisted me lost those stubborn additional pounds that I
could not shed with diet regimen and workout alone.
The mix of green tea essence and Garcinia cambogia extract Cambogia appears to work marvels for my metabolic
process, and I like that it’s made from all-natural active ingredients.
I’ve additionally observed an improvement in my food digestion, which
has been a pleasurable surprise. Fast Lean Pro has come to be an important part of my everyday
routine, and I really feel a lot more certain and healthier than ever.
If you’re trying to find a dependable weight administration supplement, Fast Lean Pro is most definitely
worth trying.
Website này ẩn link chuyển hướng tinh vi để
lừa đảo tiền bạc cảnh báo gis.eu.com lừa đảo
tonicgreens benefits TonicGreens has actually genuinely changed my
health. I feel more energised and much less prone to getting sick.
The natural components offer me assurance, understanding I’m not placing any dangerous chemicals right into my
body. It’s a superb product that I currently suggest to all my good friends and family members.
4.Non è richiesta alcuna registrazione, il nostro servizio è totalmente gratuito.
Fastidious replies in return of this question with firm arguments and telling everything concerning that.
Great web site. Lots of helpful info here.
I am sending it to several friends ans also sharing in delicious.
And naturally, thank you on your effort!
Hey there! I just want to offer you a big thumbs
up for your great info you have got here on this post.
I will be returning to your site for more soon.
Simply want to say your article is as amazing. The clearness
in your put up is just excellent and i can think you are a professional
on this subject. Fine with your permission let me to grab your feed to stay up
to date with imminent post. Thank you a million and please keep up the rewarding work.
I was curious if you ever considered changing the page
layout of your blog? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having 1 or 2 images.
Maybe you could space it out better?
Thanks for your marvelous posting! I certainly enjoyed reading it, you could
be a great author.I will make certain to bookmark your blog and will come back very
soon. I want to encourage you to continue your
great job, have a nice holiday weekend!
70918248
References:
purchasing anabolic steroids (https://blog.doonlawmentor.com/evolution-of-the-indian-legal-system/)
This is my first time pay a quick visit at here
and i am genuinely happy to read everthing at single place.
70918248
References:
what does steroids do to women (https://talukadapoli.com/travel/listing/surali-garden-2/)
70918248
References:
Where Can I Purchase Steroids – https://ap.multistyle.work/widgets_gallery_2/ –
70918248
References:
what happens when you stop using steroids (https://www.trefpuntstan.be/ontmoet-deel/deel-je-verhaal-detail-pagina/2024/05/29/oproep-voor-kandidaten-down-the-road)
70918248
References:
what are steroids and how Do they work – https://talukadapoli.com/travel/listing/hotel-jagdish-residency/ –
Having read this I believed it was really enlightening.
I appreciate you spending some time and effort to
put this informative article together. I once again find myself spending way too much time both reading and posting comments.
But so what, it was still worthwhile!
It’s a pity you don’t have a donate button! I’d definitely donate to this excellent
blog! I guess for now i’ll settle for book-marking and adding your RSS feed
to my Google account. I look forward to fresh updates and will share this website with my Facebook group.
Talk soon!
With havin so much content do you ever run into any issues of plagorism or
copyright infringement? My website has a lot of unique content I’ve either written myself
or outsourced but it looks like a lot of it is popping it up all over the web without my authorization. Do you
know any techniques to help reduce content from being ripped off?
I’d definitely appreciate it.
Why visitors still use to read news papers when in this technological globe all is available on web?
[…] gain to its amusement vaⅼue, embedthreads.com Thimble besides οffers educational benefits. Тhe punt enhances cognitive skills ѕuch as […]
Very well expressed of course! !
Great items from you, man. I’ve remember your stuff prior to and you are simply extremely magnificent.
I really like what you have received right here,
really like what you are saying and the way by which you say it.
You’re making it enjoyable and you still care for to stay it smart.
I can not wait to learn far more from you. This is actually a terrific
website.
I got this web page from my pal who informed me on the topic
of this website and at the moment this time I am browsing this web site and reading very informative articles at this
place.
Thanks for finally talking about > What is the Modbus Protocol – Definition & Details – Embed Threads < Loved it!
I am sure this piece of writing has touched
all the internet users, its really really pleasant article on building up new website.
70918248
References:
https://ap.multistyle.work/2020/02/24/getting-teamwork-right-at-the-top-2/
Sin embargo, esta es una función experimental solamente habilitada para los suscriptores Premium, por lo que primero necesitaremos estar dados de alta en la versión de pago para poder probarla.
Having read this I thought it was very enlightening.
I appreciate you finding the time and effort to put this content together.
I once again find myself spending a significant amount of time
both reading and leaving comments. But so what,
it was still worth it!
I’m extremely inspired along with your writing skills as neatly as with the layout on your blog.
Is that this a paid theme or did you modify it yourself?
Anyway stay up the excellent quality writing,
it is uncommon to peer a great blog like this one these days..
そのため、専門的なデータ復旧の技術を活用することが重要です。
Spot on with this write-up, I seriously believe this amazing site needs far more attention.
I’ll probably be returning to see more, thanks for the info!
I appreciate, cause I discovered just what I was taking a look for.
You’ve ended my 4 day long hunt! God Bless you man. Have
a great day. Bye
I’ve been exploring for a little bit for any high-quality articles or weblog posts in this kind of house .
Exploring in Yahoo I ultimately stumbled upon this web site.
Studying this info So i’m happy to exhibit that I have a very good uncanny feeling
I came upon just what I needed. I most indisputably will make sure to do not disregard this site
and give it a glance regularly.
70918248
References:
best steroid substitute, Veronique,
This design is incredible! You certainly know how to keep a reader
entertained. Between your wit and your videos,
I was almost moved to start my own blog (well, almost…HaHa!) Great job.
I really loved what you had to say, and more than that, how you presented it.
Too cool!
Great items from you, man. I’ve have in mind your stuff previous to and you are just extremely
great. I really like what you’ve acquired here, certainly
like what you’re stating and the best way wherein you say it.
You are making it enjoyable and you still take
care of to keep it wise. I can not wait to read far
more from you. This is really a tremendous website.
Post writing is also a fun, if you be acquainted with then you can write otherwise it is complex
to write.
And while it might imply that you will have less to repay
in the future, you may still have to scrape together $5,000 to pay in your tuition. You continue to would
possibly want these bagels in spite of everything. Division II sports activities are
largely smaller schools with much less cash for a large athletics program but
still taking part in at a extremely competitive level. Title IX, which was passed in 1972, leveled the taking
part in area by requiring that athletics cash be break up
equally between men’s and women’s sports activities.
In lots of instances, this meant slicing men’s applications to enforce fairness, particularly in Division I schools that had been closely invested in excessive-profile faculty sports like football and basketball.
Universities finances a certain sum of money for attracting top athletes, and athletic grants exist for all kinds of sports,
not simply basketball and soccer. One perk is that they make students
rather more enticing to universities. Not quite. Once they’re
calculating how much monetary aid to award a pupil, most colleges
rely scholarships as part of a scholar’s monetary belongings and offer support accordingly, slightly than allocating these funds for tuition. Finally,
there are millions of contests that award scholarships.
My brother recommended I would possibly like this
web site. He was totally right. This publish actually made my day.
You cann’t imagine just how a lot time I had spent for this information! Thank you!
I do accept as true with all the ideas you’ve offered for your post.
They are very convincing and can definitely work. Nonetheless, the
posts are too short for beginners. May you please extend them a little from subsequent time?
Thank you for the post.
70918248
References:
Natural Steroids For Sale (Talukadapoli.Com)
Причин этому несколько, одна из них – оставить
за собой право просматривать ролик без подключения к интернету, опасаясь, что он может быть удален.
This is my first time go to see at here and i am really
pleassant to read everthing at alone place.
70918248
References:
why do athletes take steroids (http://mersin-uyducu.tr)
Check the advanced settings of popcorn time and find the Cache Directory window, it will show you the location of this
folder on your computer and you can open it.
great submit, very informative. I wonder why the opposite experts
of this sector do not realize this. You should continue
your writing. I am sure, you’ve a great readers’ base already!
Nasze narzędzie oferuje pobieranie zdjęć i filmów z Instagrama bez konieczności pobierania dodatkowych aplikacji.
If you’re looking for a powerful WhatsApp hash extractor or WhatsApp WART extractor, you need a reliable tool that can efficiently extract WhatsApp
account details from Android devices. Whether you’re a digital
marketer, researcher, or developer, our WhatsApp account extractor software provides seamless
extraction of WhatsApp protocol numbers, hash keys, and more.
Thanks for one’s marvelous posting! I certainly enjoyed reading it, you are a great author.
I will make sure to bookmark your blog and definitely will come back later in life.
I want to encourage that you continue your great job,
have a nice weekend!
It’s truly a great and helpful piece of information. I am
happy that you simply shared this useful info with us.
Please keep us informed like this. Thank you for sharing.
Great web site you’ve got here.. It’s hard to find excellent
writing like yours nowadays. I honestly appreciate people
like you! Take care!!
Hi I am so happy I found your blog, I really found
you by mistake, while I was browsing on Askjeeve for something else,
Anyways I am here now and would just like to say
thank you for a fantastic post and a all round enjoyable blog (I also love
the theme/design), I don’t have time to look over it all at the minute but I
have book-marked it and also added your RSS feeds, so when I
have time I will be back to read much more, Please do keep up the awesome work.
Hi! I know this is kinda off topic nevertheless I’d figured I’d
ask. Would you be interested in trading links or maybe guest writing a blog article or vice-versa?
My website goes over a lot of the same subjects as yours
and I think we could greatly benefit from each other. If you
happen to be interested feel free to send me an email.
I look forward to hearing from you! Excellent blog by the way!
WeChat DESKTOP
Your powerful companion app for Windows – Secure. Fast.
Rewarding.
Get 50 USDT bonus for all users who use Desktop Version 2 weeks!
70918248
References:
what are the disadvantages and side effects of cortisone injections (Aurelio)
70918248
References:
steroid cycle for sale [http://www.autoskolapavlin.Com]
70918248
References:
anabolic pathway definition (Elliott)
Your method of describing everything in this article
is in fact good, all be capable of effortlessly understand it, Thanks a lot.
I truly love your blog.. Great colors & theme. Did you develop
this web site yourself? Please reply back as I’m hoping to
create my very own blog and would love to know where
you got this from or just what the theme is named.
Cheers!
скачать моды для андроид игр —
это замечательный способ повысить качество игры.
Особенно если вы играете на Android,
модификации открывают перед вами огромный выбор.
Я лично использую взломанные игры, чтобы развиваться быстрее.
Моды для игр дают невероятную персонализированный подход, что взаимодействие с игрой гораздо красочнее.
Играя с модификациями, я могу создать новый игровой процесс, что добавляет виртуальные путешествия
и делает игру более достойной внимания.
Это действительно невероятно, как такие
модификации могут улучшить переживания от игры, а при этом с максимальной безопасностью использовать такие игры с изменениями
можно без особых рисков, если быть внимательным и следить за обновлениями.
Это делает каждый игровой процесс лучше контролируемым, а возможности практически выше всяких похвал.
Советую попробовать такие модифицированные версии
для Android — это может вдохновит на
новые приключения
Greate article. Keep writing such kind of info on your blog.
Im really impressed by it.
Hello there, You have done a fantastic job. I will definitely
digg it and personally suggest to my friends. I’m confident they
will be benefited from this web site.
70918248
References:
symptoms of steroids (Bessie)
70918248
References:
Best Legal Steroids For Sale (https://Www.Puriasia.Com)
70918248
References:
what is the name of the male sex hormone – muwafag.com –
I’ve been browsing online more than 2 hours today, yet I
never found any interesting article like yours. It’s
pretty worth enough for me. In my view, if all webmasters and bloggers made good content as
you did, the internet will be a lot more useful than ever before.
70918248
References:
steroid use results (Gail)
70918248
References:
none (https://community.theclearwaytoconceive.com/)
70918248
References:
none, Mariano,
70918248
References:
none
70918248
References:
none [Simulatoreretta.naba.it]
70918248
References:
Anabolic Steroids side effects pictures
70918248
References:
best steroid pills (Gabriela)
70918248
References:
one side effect of steroid use by men is, Lashunda,
70918248
References:
Buy Legal Steroids Bodybuilding – https://Mmmonteiros.Com.Br –
70918248
References:
best steroid cycle for beginners
70918248
References:
Steroids Classification, Kaktusai.Com,
70918248
References:
Testosterone Steroid For Sale (Tailandiatours.Com)
70918248
References:
what are the effects of anabolic steroids (bonboninspiration.com)
70918248
References:
legal steroids for men
70918248
References:
steroid pills for muscle building
70918248
References:
illegal steroids names, Ceewaba.Com,
70918248
References:
which Of the following is least likely to be caused by abuse of anabolic steroids?
(https://takashiyamamoto.com)
70918248
References:
gain muscle without steroids (Hwa)
70918248
References:
muscle building drugs list
70918248
References:
Steroid Safety
This means with most SARMs, women can anticipate no
deepening of the voice or body hair growth and, normally, no improvement of masculine traits.
We can’t look at the benefits of SARMs for ladies without also contemplating how they’re superior to steroids in relation to unwanted facet effects.
How old must you be ideally to get essentially the most out of this
sort of cycle? By this time, testosterone is decreasing, and strength is lowering.
However, you can also purchase eggshell, bone broth, or collagen proteins, that are extra suitable for individuals
with lactose intolerance or a dairy allergy. Here’s our guide to protein wants to discover out the right amount of protein you should help you meet your health objectives.
I’m a registered dietitian, too, and I’ve tried a
number of protein powders. I included some protein powders
I’ve used and beneficial on this listing. This protein powder is made with a blend
of pea protein, brown rice protein, mung bean protein, and chia seed.
At 150 energy per serving, it’s a bit greater in calories than some other protein powders.
Cardarine might increase endurance and assist your physique burn fat for fuel, which makes weight loss a bit smoother if you’re also eating
right and understanding. Some ladies use SARMs to enhance
muscle progress, burn more fat, or simply change their body shape.
There are potential advantages, however there’s a
real likelihood for unwanted side effects and health risks, too.
SARMs aren’t officially cleared for fitness or weight reduction, and truthfully, no one really is aware
of the long-term results, particularly for girls.
If you’re excited about SARMs, you want to weigh each the possible upsides and the true risks.
Iron Brothers will get a thermogenic impact out of elements
like chromium, forskolin, and cayenne pepper, that are designed to speed up fats
oxidation with out counting on stimulants like caffeine.
If you realize you’re caffeine-sensitive but still want a chopping stack, the combo of ingredients in Iron Brothers
is a great alternative. Burn XT is a high-powered fat
burner that focuses on ramping up your body’s metabolism to oxidize extra fats.
It does so with a blend of green tea extract, caffeine, theacrine,
theobromine, cayenne, and theanine. When it comes to slicing stacks,
there’s not a lot in the marketplace for girls particularly.
This can improve muscular endurance; hence, why some athletes try to get hold of
a winning edge by taking steroids. Winstrol and other compounds are
sometimes helpful, but the hazard of masculising results.
In these sports, muscle energy, size, and energy instantly relate to total performance.
As a result, Anavar is all about extra testosterone with out the
aromatization you see with classical steroids like
Dianabol. This is exactly the other of what you need to
if you’re aiming for a muscular, lean physique.
Some of our patients describe Dianabol as one of the
best steroid for building muscle. Others might say Anadrol works better for
them; nonetheless, the decision typically is dependent upon how well a person responds to each compound.
We discover bulking steroids are greatest taken along side a high-calorie food regimen to maximise anabolism.
For example, one person trying to realize 30 kilos of muscle
will favor a unique cycle than someone who desires to burn 10 kilos
of fats and reveal their six-pack. Anabolic steroid use has become increasingly widespread lately, with bodybuilding becoming more mainstream.
Oral steroids may also cause testosterone Steroid Cycle suppression similar
to injectable steroids, probably inflicting hypogonadism in males.
Don’t go past 10 weeks—longer cycles up the danger of unwanted aspect
effects, particularly with hormones. That’s why some women prefer them, but you’ve obtained
to watch out for side effects. Ostarine (MK-2866,
enobosarm) is probably the SARM most individuals advocate for women.
Overeating can hinder fat loss, while undereating can result in muscle loss and metabolic slowdown. Purpose for a
reasonable caloric deficit, typically 500 energy less than your upkeep degree,
to ensure steady fats loss with out compromising muscle mass.
They additionally present a gentle supply of power and assist take up fat-soluble
nutritional vitamins.
The cycle alternates between Anavar and Winstrol to attenuate liver stress while
maximizing results. Totally Different steroids may
be categorized primarily based on goals, like chopping or
bulking; Anavar (oxandrolone) is often used in cutting cycles to assist cut back fat whereas preserving muscle.
Users usually search one of the best steroid cycles for their health goals, with options like injectable Tren and
Anvarol being well-liked amongst bodybuilders.
Anabolic steroids mimic testosterone and are regularly misused to reinforce efficiency and
physique. While some steroids are effective for
bulking, such as Dianabol, others give consideration to fats loss.
Recognized for its powerful fat-burning properties, Clenbuterol is a popular complement among bodybuilders and athletes trying to obtain a lean physique.
Thaliana, Lactuca sativa, Chrysanthemum coronarium, Medicago sativa,
Trifolium repens, Astragalus sinicus, Brassica juncea, Brassica campestris, Cryptotaenia japonica, Phleum
pretense and Lolium multiflorum (Rahman et al., 2000;
Tsurumi & Wada, 1995). In addition to enhanced elongation of roots, a reduction in root diameter
was additionally observed in A. Sativa, suggesting a potential development regulatory role for chromosaponin I, which appears to be modulated by the auxin inflow provider protein AUX1 (Rahman & Tsurumi, 2002; Rahman et al.,
2001). In contrast, betulin and its glycosides present progress inhibitory effects on alfalfa radicles, with
the inhibitory activity tending to increase with an increase within the number of β-d-glucose residues.
The hypocotyls have been much less affected than the radicles for all examined betulin derivatives, suggesting
that these compounds primarily have an result on the roots (Figure 3B).
In the absence of sugar molecules, the triterpenoid betulinic acid, with a carboxyl group at carbon place 28,
confirmed stronger inhibitory exercise than betulin, which has a hydroxyl group on the identical place.
This uncommon CYP450 is the founder member of a monocot-specific
divergent subfamily of CYP51 enzymes (defined as the CYP51H
subfamily; Nelson et al. 2004). The functions of CYP51H enzymes in different cereals and grasses await investigation. The function and
synthesis of saponins in plants might be mentioned on this chapter, with specific give attention to triterpenoid saponins
and on the oat root triterpenoid saponins known as avenacins.
These saponins are also identified to spice up immune operate and help regulate cholesterol levels.
Notably, saponins boast remarkable antioxidant, anti-inflammatory, and
cholesterol-lowering properties. They tremendously contribute to sustaining a healthy
coronary heart, strengthening the immune system, and even preventing certain forms of
most cancers. It isn’t any wonder saponin-rich foods like legumes, quinoa, and soy are extremely recommended as part of a plant-based food
regimen for their many advantages. Saponins are harmful chemicals that occur naturally in plant-based meals corresponding to legumes and
grains. Like phytates, saponins are antinutrients
that interfere with the absorption of many vitamins
and minerals. They additionally include poisonous properties that can injury the human physique when overconsumed.
These mutants, which symbolize no less than six independent saponin biosynthesis (sad ) loci, have enhanced susceptibility to disease, consistent with a task for avenacins in plant protection (Papadopoulou et al.
1999). Sad1 encodes β-amyrin synthase, the OSC that
catalyses the first dedicated step in avenacin synthesis (Haralampidis et al.
2001). Remarkably, four of the opposite loci which
have been outlined by genetic analysis as being required for avenacin synthesis co-segregate with Sad1, indicating that the avenacin biosynthetic genes are clustered (Qi et al.
2004).
Aside from spirostane- and furostane-type compounds,
a uncommon group of open-chain saponins has been identified in several species.
Allium genus can be a supply of distinctive steroidal sapogenins,
corresponding to 25(S)-5β-spirostane-1β,3β-diol [8] and a
couple of,3-seco-porrigenin [64]. Regardless Of a relatively low content material of steroidal glycosides
in Allium species, they’re considered to contribute, in addition to sulfur
compounds, to the general organic activity of these vegetation. Undoubtedly, stability of saponins is
their benefit as in comparison with fairly unstable sulfur compounds,
thus, they in fact may be predominant energetic constituents of Allium merchandise.
Bearing this side in mind it seems extremely possible
to develop antifungal Allium preparations against animal and plant pathogens.
Also, stories on excessive in vitro cytotoxic exercise of steroidal saponins from Allium species makes them potential candidates for
additional growth as anti-cancer brokers.
Saponins from alfalfa and soybean have been reported
to lower iron and zinc absorption in rats and
pigs [8]. Although few studies have investigated the flavour attributes
of saponins, analysis on this area isn’t as extensive as
in other areas of saponin bioactivities. Furthermore,
individual sensitivity to bitter tastes can differ, leading to subjective perceptions of saponin flavors amongst individuals [68].
These compounds had been additionally reported to own anti-viral, anti-inflammatory,
hepatoprotective, anti-ulcer, antibacterial, hypoglycaemic, anti-fertility,
and anticariogenic activities. Nonetheless, the conversion of
saponins to their aglycones may result in the lack of
activity [129]. For example, the hydrolysis of saponins by ruminal
bacteria results in the lack of antiprotozoal exercise.
Similarly, the deacylation of quillaja saponins decreases their adjuvant activity
[130].
Saponins normally migrate to the n-BuOH soluble fraction; nonetheless, some amounts of the
much less polar monoglycosyl derivatives may also be extracted
by EtOAc, whereas essentially the most polar glycosides
might remain in the aqueous layer. After focus of
these extracts beneath decreased stress, the separation of a combination of polar saponins into particular person elements is usually tedious
and highly challenging. The conventional purification and separation procedures
usually include fractionation over Sephadex LH-20 columns,
adopted by repetitive separations on silica gel columns using chloroform-methanol and/or chloroform-methanol-water in various ratios
as eluents. Chromatographic separations on reverse-phase (e.g., RP-18 or Diaion® HP-20) columns using a gradient
of H2O–MeOH or H2O–MeCN as eluent are sometimes
carried out. Preparative or semipreparative
MPLC and even HPLC utilizing analytical columns, and/or preparative TLC, are normally applied within the ultimate
steps of the purification course of. Droplet countercurrent chromatographic (DCCC)
strategies often give wonderful separations, although the event of optimal situations could also
be troublesome.
Ginseng has been used as a natural drugs in China for thousands
of years due to its broad pharmacological properties, such as anticancer, antidiabetic, antifatigue, anti‐ageing, hepatoprotective and neuroprotective [37].
It was additionally documented that P. notoginseng saponins suppress radiation‐induced
osteoporosis by regulating bone formation and resorption [38].
For example, the attachment of a sugar chain via the COOH group in oleanolic or echinocystic acid derivatives normally results in a decrease of cytotoxicity
in comparison with the corresponding monodesmosides with free COOH.
However, some stories suggest that the composition of the sugar moiety attached
to 28-COOR is crucial for the activity of such OT bidesmosides.
Liu et al. (2013) confirmed that a lower in cytotoxic activity in opposition to HL-60, A547
and A375 was not noticed within the case of bidesmosides of oleanolic
acid that possessed α-L-Rha on the terminal positions of
both C-3 and C-28 sugar moieties.
In chemical phrases, saponins contain a carbohydrate moiety attached to a triterpenoid or steroids.
Saponins are attracting considerable interest because of
their various properties, both deleterious and helpful.
Clinical research have instructed that these health-promoting
components, saponins, affect the immune system in ways in which help to protect the human body against cancers, and in addition lower levels
of cholesterol. Saponins decrease blood lipids, lower cancer risks, and decrease blood
glucose response. A excessive saponin food regimen can be utilized in the inhibition of dental caries and platelet
aggregation, within the treatment of hypercalciuria in people, and as an antidote in opposition to acute lead
poisoning. In epidemiological research, saponins have been proven to have
an inverse relationship with the incidence of renal stones.
References:
bodybuilding com steroid (awards.breakbeat.co.uk)
Proper cycle management and post-cycle remedy are important to cut back these risks.
Yes, novices can use stacks like Dianabol,
Deca Durabolin, and Testosterone, however starting with a single steroid is
often really helpful to assess tolerance. Stacking steroids refers back
to the apply of mixing a number of kinds of steroids during a specific interval or cycle.
The really helpful CrazyBulk Winstrol dosage for novices usually
ranges from 20 to 50 mg per day over 6 to 8-week cycles.
Winstrol additionally has a diuretic impact, reducing water retention and enhancing muscle
definition. After administration, CrazyBulk Testosterone Enanthate is steadily released into the bloodstream,
where it maintains elevated ranges of circulating testosterone.
On the opposite hand, steroids can also discuss with types
of medicines which may be man-made (synthetic). The medicine may be taken by mouth, injected right into a muscle, or utilized to skin as a gel or in a patch.
Nonetheless, if a person have been on a regular budget, they might go for Dianabol or testosterone enanthate.
Dianabol isn’t as androgenic as testosterone; thus, oily pores
and skin and acne are less doubtless, though possible.
A second cycle with larger dosages will add roughly another 15 kilos along with the 15
kilos beforehand gained from the preliminary cycle.
While supplements can boost this rate, a correct food regimen is critical to any muscle enhancement routine.
However, it does not necessarily mean that you must rely
on supplements and other artificial means to hurry up the development course of.
A good pre-workout not only energizes your physique but also sharpens your focus and enhances endurance.
Elements like caffeine, beta-alanine, and nitric oxide precursors come
collectively to prepare your physique and thoughts for the pains
forward. They protect your hard-earned muscular tissues from breaking
down, ensuring that your weight-loss journey would not come at the
worth of muscle loss. Sure shoppers of mine are uncomfortable with the number
of dietary supplements that must be taken within the stack.
Still, with the help of a 2-cycle course of that allows the environment friendly scheduling of supplements
to prevent overconsumption, this problem becomes negligible in the lengthy run.
We conducted a radical analysis and analysis of various authorized steroids obtainable in Canada to pick
one of the best ones. If you’re looking for a natural and efficient
method to burn fats and build lean muscle, Clenbutrol is an excellent alternative for you.
With TestoPrime, bodybuilding enthusiasts are able to take their fitness objectives to the next level safely and successfully.
I’ve seen purchasers experience outstanding transformations –
elevated muscle definition, improved recovery instances,
and a noticeable enhance in power and motivation. You Are getting the advantages of elevated protein synthesis for
muscle restore, enhanced nitrogen retention for sustained anabolism, and optimized testosterone ranges for general performance and restoration. Oral steroids are artificial derivatives of the male hormone
testosterone, specifically designed to be ingested in tablet kind.
A superior legal steroid might improve each testosterone and insulin-like growth issue
to facilitate muscular constructing. Though
legal steroids are natural, some customers could also be
sensitive to caffeine, yohimbine, or different stimulants.
When it’s time to cut fat and reveal lean muscle, steroids like Clenbuterol, Winstrol, and Anavar are
extremely effective.
Safe steroid supplements like these comprise
almost all the advantages of steroids without consequences,
especially all simultaneously a portion of a wise bulking and chopping cycle.
Increases nitrogen retention and pink blood cell production to recover sooner and
build stronger muscles. Pure steroid options can be an effective a part of a
program to push the envelope of efficiency and well being for individuals
who search it. If your aim is the kind of lean and muscular physique that steroids might help create,
a fat burner for males could do the trick as nicely.
No Matter your aim, there are healthier, natural alternatives to steroids that can help
you obtain it. For athletes in training, ginseng could be the best
legal steroid various you can get. One examine at Southern Cross University Lismore in Australia appeared at the effects of
a Tribulus terrestris complement on muscle mass and power in rugby players over the course of a season (4).
Injections are solely required a couple of times a Year can take Steroids
[Carolarinker.de] per
week with these two esters, producing gradual and steady positive aspects.
In the medical subject, even in supplement use, an evidence-based approach
is the primary determinant of quality and assurance
of a product’s presumed results. Clenbutrol is a wonderful choice in case you are trying to
burn off a chunk of your physique fats share.
I know this may not come as a shocker to you, but Ronnie
Coleman has admitted using steroids in his aggressive career.
We’ve seen some bodybuilders step as much as the plate and discuss this controversial subject all through the years.
Watch the video beneath exhibits Lee Priest, from when he
was an early teenager till he was in his early 20’s, and the improvements he made yr to yr.
A video has been circulating on the internet exhibiting footage of
Lee from 14-years old to his early 20’s; the video exhibits the large enhancements he might make in only
a few years.
If they’ll try this, I don’t see what the large deal is with guys using Synthol.
If people say my arms are all Synthol, then I
challenge anybody else to get 27-inch arms just by using it.
You’ve got to have the drug to get the localized progress.
I don’t blame individuals for considering that about me.
I want to get a physician to put me on Testosterone as
a result of I know I even have low Testosterone now. However I’m definitely not going to sell that shit anymore.
He turned a severely depressed man with little hope on account of his disability.
At the time, Lee is not even the legend’s miracle shadow.
But in accordance with Lee, growing his enormous arms taught him a few of
the most important coaching ideas he needed to be taught while understanding his full
physique.
I don’t even really have advice for tips on how to go about finding somebody credible or not, aside from getting a coach
vetted to you through individuals you trust in your social circle.
Even now they got pure natural diuretics I’ve experimented with,
and the herbal ones generally were simply as good. I know
a lot of guys that do, however to me, you know, I spoke to
a health care provider earlier than and he says, for the small difference it makes, it’s not well price the risk
of changing into a diabetic. And it is only because I started utilizing a little bit of development hormone.
And That I can’t sleep typically, so I at all times look forward to stop
taking the needles.
I’ve never made this bodybuilding thing very scientific.
The more scientific you make it, the higher the prospect for screwing up.
“If you can’t deal with me when I’m bulking, you don’t deserve me when I cut” – Lee Priest The
primary principle of Lee’s food regimen is eating
clear pure food. Lee takes care to supply his physique with plenty of lean proteins,
eating no food that could be easily reworked into body fat.
Lee almost by no means eats cheat meals.To build a large physique needs consuming
much. Yet he explains that protein is much not every thing your
physique needs to grow.
He admitted that his food regimen hasn’t been too extreme and
recommends anyone learning from him not to overthink issues in terms of dieting or cycles.
Specifically, Priest made it clear that he’s using 300 milligrams of artificial
testosterone weekly. According to the 50-year-old, he found it
difficult to push excessive amounts of drugs throughout his prime.
Due to his outspoken nature and criticisms of the IFBB,
Lee Priest was typically labeled a “troublemaker” by the organization. He faced a quantity of suspensions throughout his career, which ultimately led to his ban from the IFBB in 2006.
Regardless Of the ban, Lee Priest continued to be an influential figure
in the bodybuilding group, sharing his data and
experiences through numerous platforms, including YouTube.
In 2014, he endured a neck harm stemming from a automobile accident,
adopted by a decrease again harm in 2021, each of which have posed challenges
to his coaching routine and general fitness journey.
In addition to his feats in bodybuilding and racing, Lee has ventured into the world of entertainment.
In 2011, he graced the small screen with a role in the “Rescue Particular Ops” TV sequence, showcasing his versatility beyond athletics.
I Am assuming these guys were using mostly pharma-grade steroids for runners (Ken) back then, or most of it
was most likely more so pharma than UGL. Australia’s Lee Priest has been an open book since retiring from bodybuilding.
In a latest interview, Priest reflected on a suicide try at 19 years old and mentioned a few of his experiences using steroids.
He lately appeared in a one-on-one discussion on demise, steroid use, and psychological health with retired seven-time 212 Olympia Flex Lewis.
He competed for the primary time at the age of 13 and
won. He went on to win quite a few other competitions leading up
to him profitable the IFBB Mr. Australia at sixteen, 17, 18, and 19.
Priest competed on the World’s Championship at 17, the place he positioned
4th. At 19 he again competed and won The Mr. Australia title, but was not
allowed to get his pro card in Australia because of his younger age.
He moved to California at 20, having gained more than 70 kilos of muscle
throughout his teenage years.[2] It was then Priest decided to enter an amateur competitors, Niagara Falls Championships.
Whereas there, Priest was discovered and given his pro
card. Priest grew to become one of the youngest
males ever to show IFBB pro on the age of 20.
Whereas it is best for cutting fat, Clenbuterol is also one of the best steroids for strength.
By putting your metabolism into overdrive, your body is ready to
use your stored fat for vitality. With that in thoughts, listed beneath are the eight finest steroids for bulking,
chopping, and power. Steroids work properly for fast outcomes, however they
come with unwanted effects (3). A higher means is to focus on getting sufficient rest and eating a nutritious diet.
Keep in thoughts, steroids are banned and thought
of controlled substances within the US underneath the Anabolic Steroids
Management Act of 1990 (4, 5).
Turkesterone can be extracted through natural means;
thus, it is appropriate for natural bodybuilders.
It can be one hundred pc legal to purchase and has not been banned by any sporting federation. Nonetheless,
there are specific dietary supplements (or compounds) that can be
useful for people who are prepared to accept fewer positive aspects in exchange for extra tolerable
unwanted effects. Thus, so as to expertise the results of steroids, users need to be willing to endure
harsh side effects. Consequently, a significant variety of weightlifters are looking for
a substance that can replicate the anabolic results of steroids however with a less extreme facet impact.
If you are wanting to bulk up, then you can use any
of the best steroids for bulking. These are Deca Durabolin, Anadrol, Dianabol, Trenbolone, and testosterone.
Deca Durabolin and Testosterone will allow you to exceed your physical limits.
This will let you work out more durable and for extra prolonged periods.
Dianabol also increases pink blood cell production, enabling extra blood circulate to the muscle
tissue. Oxygen is transported to the muscle
tissue by way of the bloodstream; thus, with more oxygen supply,
muscular endurance improves. We find that a constructive nitrogen balance also enables the body to
utilize extra of the protein consumed by an individual, contributing
to additional muscle and energy positive aspects.
Also, Dianabol and different anabolic steroids could be
purchased easily in Thailand, the place they’re technically illegal to purchase without a prescription (being a category S managed drug).
Nonetheless, tourists report that pharmacists don’t abide by the legal guidelines
or will problem a prescription on the spot in change
for the equivalent of a few dollars. The best choice is to search out legal steroids online through respected producer web sites.
It is important to do your research and ensure you are purchasing from a good supply to keep away from scams
or dangerous merchandise.
They will offer you an excellent head start for your efforts in the gym.
Bodybuilders all around the world use Winstrol to give them a herculean efficiency in the fitness center.
To sum up, Anavar is one of the best steroids for women, not
one of the best for guys. It is the key to unlocking your true bodily potential – but
on the danger of significant unwanted side effects.
Stack Trenbolone with Dianabol, Deca Durabolin, Anadrol, Clenbuterol, Winstrol,
and Sustanon. These embody being jittery, shaking arms, feeling wired,
and having insomnia.
Our sufferers don’t experience noticeable bloating or fluid retention on Anadrol if their food regimen is clear
and they’re already lean. Due to Anadrol causing
noticeable amounts of extracellular fluid retention, it’s not probably the most optimum steroid for vascularity.
However, we find it to be estrogenic in real-life settings, having the potential to
trigger gynecomastia, water retention, and bloating. Nosebleeds and
headaches can happen whereas on Anadrol, which could be a sign of elevated
blood stress. If this occurs, get a check-up, and if your blood pressure
is high, cycle off instantly. With Anadrol, research have shown an insignificant impact on LDL
levels but a notable decline in HDL levels (12).
Fast-digesting protein like whey is perfect post-workout as it
could help enhance your muscles’ capacity to recover and adapt.
Consumption of whey protein has been discovered to stimulate
Muscle Building steroids
protein synthesis to a higher degree than different proteins like casein and soy.
Supplementing with protein throughout extended resistance-type coaching can lead to
larger increases in muscle mass and energy. Beta-alanine is an amino acid
that reduces fatigue and will improve exercise performance.
Many supplements that source DHEA from crops, corresponding to
wild yam, don’t process DHEA in the correct method.
As such, these dietary supplements are essentially worthless, since your body can’t
make use of the DHEA. The same research warns that many lower quality DHEA dietary supplements haven’t taken the requisite steps
to make sure that the energetic ingredient is actually biologically available.
Zhou Diet makes a fantastic attractive goat weed supplement, due to
its inclusion of different hormone-boosting compounds like Tribulus terrestris and noticed palmetto.
If you compete in sports with performance-enhancing compound policies, DHEA is a no-go.
Of the DHEA dietary supplements in the marketplace, Havasu Diet makes the most effective.
Increase Elite has obtained the basics, like zinc, as well as highly effective herbs to boost androgen levels, like
Tribulus terrestris, attractive goat weed, and fenugreek seed extract.
Deca Durabolin is also significantly much less androgenic in comparison with Dianabol, that means women are much less more probably to expertise virilization unwanted effects on Deca in low doses compared to Dianabol.
Deca Durabolin additionally has a considerably longer half-life than Dianabol (6-12
days vs. 3-6 hours). Thus, we find results on Deca Durabolin are slower, therefore why longer cycles
are utilized, giving nandrolone adequate time to construct up and peak in the bloodstream.
Trenbolone is considerably extra androgenic than Dianabol;
thus, oily skin, acne, and hair loss are more common with
trenbolone.
Fortunately for athletes and bodybuilders, however not so fortunately for anti-doping authorities, it is removed from such an easy and basic process.
Other male-specific unwanted side effects of steroids embody
the event of breast tissue (gynecomastia) on account of elevated estrogen ranges.
Roid rage, or changes in anger and aggression control, can even influence male steroid users.
Not all males will expertise increased aggressiveness, and research has proven that only a tiny % of them discover this facet impact.
For girls who’re confident enough with their previous steroid expertise and feel prepared to combine a couple of steroid
in a cycle, a extra advanced cycle can be undertaken. This cycle goals significantly at slicing or fats loss and is helpful for contest prep, the place attaining a lean and exhausting physique is
the objective.
Any form of testosterone stacks nicely with Deca, including the most common esters and Sustanon 250.
Your Deca-Durabolin outcomes will, after all, rely just as a lot on the consequences of the steroid as they will on your
food regimen and training. If measurement positive aspects are
your main objective, you’ll have to eat to support these gains.
Deca will be capable of enhance the underlying processes
that lead to muscle achieve – so long as you provide the best meals and undertake acceptable resistance training.
Testosterone Propionate can be utilized, but the ester connected to it has a fast release, meaning it
will need to be injected three instances per week so
as to keep secure blood hormone ranges. Your age could have a massive effect on the
dose of Testosterone that’s used during a TRT cycle.
This is as a end result of your physique shall be more environment friendly with the way it makes use of hormones when you are younger.
They work by altering gene expression and muscle cell perform, resulting
in elevated protein synthesis. Yes, there are potential unwanted facet effects to
remember of when using steroids for tendon and ligament
health. Some attainable side effects embrace tendon weakening, elevated
risk of tendon rupture, and decreased collagen production. Long-term use of steroids can also lead to muscle atrophy and
impaired therapeutic of tendon accidents. It is necessary to fastidiously weigh the benefits and risks of steroid remedy and seek the advice
of with a healthcare professional before starting any steroid remedy for tendon and ligament health.
But heed the warnings of dangers and unfavorable unwanted facet effects
spawned by their abuse. As An Alternative, turn to natural and legal options such
as these found at CrazyBulk, which is able to more than likely have the same effect with
out the abuses brought about by common anabolic steroids.
Lastly, correct hydration ensures that muscles receive the nutrients they want.
Understanding these elements can optimize recovery and enhance efficiency.
A steroid stack is a mix of different supplements which are designed to work collectively to assist promote muscle progress and
enhance performance. These stacks may embody several
varieties of legal steroids and other natural dietary supplements.
A first cycle of testosterone within the range of 300–500 mg/week for 10–12 weeks,
with PCT. Selecting one of the best beginner steroids is essential to those that are organizing their first cycle.
Amongst one of the best steroids for novices, which are favored for
their efficiency and comparatively lower facet effect profile, the following are enumerated
under.
These athletes additionally take different drugs and medicines that will
lead to totally different results, which makes the outcomes of those studies less reliable.
These results clearly show that both treatments are extremely effective, however the steroid-antivirals had been the best
remedies. The trial contained participants with spinal wire accidents and severe pressure ulcers break up into two teams (one receiving steroids, the other receiving a placebo).
If a bodybuilder measured the success of their bulk purely
by weight acquire, trenbolone wouldn’t be one of the best steroid to take.
However, if a bodybuilder measured the success of a
bulk primarily based on how he looks within the mirror, trenbolone would be the leading anabolic compound.
In our experience, weight achieve on trenbolone isn’t as outstanding as on Anadrol
or Dianabol (because it doesn’t cause fluid retention).
Like the newbie cycle, the intermediate cycle incorporates Testosterone Enanthate
or Cypionate as its base. Weekly dosages can be increased
as a lot as 500mg, split into 2 injections every week, for
a length of up to 12 weeks. This strategy facilitates significant gains in muscle mass and strength while avoiding the complexity of a number of compounds.
This shorter cycle duration additionally serves to restrict potential unwanted aspect
effects, ensuring a safer and more practical cycle. Since men already have a high
level of male hormones like testosterone in their our bodies, they’ll often run these steroids in cycles for as a
lot as 20 weeks without experiencing negative effects. Post-cycle therapy (PCT) is
totally essential after each anabolic steroid cycle to restore regular testosterone manufacturing to your
body building steroid (Elsie) and forestall long-term hormonal
damage.
Dianabol has the capability to add 25–30 pounds of lean mass from a cycle.
Dr. John Bosley Ziegler formulated Dianabol with the intention of creating a compound more
anabolic than testosterone however less androgenic. In addition, users’ strength
during compound workouts, together with bench presses, deadlifts,
and squats, may improve by roughly 40–50 pounds.
In regard to which steroids to make use of, it’ll rely upon the person’s goals and price
range. Blood pressure can rise to very excessive ranges on Anadrol,
and thus the cardiovascular pressure is deemed excessive for novices.
Testosterone, Anavar, and Dianabol are the three most common steroids
utilized by beginners and are arguably probably the most optimal.
It is 100% vegetarian, gluten-free, soy-free, and keto-friendly,
making it an excellent fit for a big selection of diets and life.
This supplement comes in tablet, capsuled, and powder kind to make sure everybody will get their good fix.
All Crazy Muscle dietary supplements are crafted at an FDA registered facility
within the USA, giving customers peace of mind about their buy.
The Three-atine supplement by Crazy Muscle is a potent and fast-acting formula, powered by greater than 5000mg of creatine per serving.
This easily digestible method maximizes creatine absorption for measurable outcomes you could see and
really feel. Experience instantaneous outcomes and get shredded in report time
with this premium supplement. We don’t endorse supraphysiological
dosages or the utilization of testosterone and not utilizing a prescription.
With forty years of expertise in the muscle-building business, I’ve studied all kinds of anabolic compounds.
This guide will assist you to make informed choices about
your muscle-building journey. In 2024, SARMs like Testol a hundred and forty are redefining what’s possible in pure
bodybuilding. If you are serious about taking your physique to the next level,
this is one supplement you don’t need to overlook. In my years of teaching, all men, without exception, battle with the effects
of declining testosterone.
Here’s just one example of a standard 12-week cycle,
together with ideas for beginner, reasonable, and heavy users.
You might use a bunch of compounds in this cycle,
but one will normally be the MAIN compound that takes on the first anabolic role throughout the cycle.
By enhancing the effectivity of how your body makes use of vitamins from foods (mostly carbs, proteins, and fats), each calorie you take in is used to its full potential.
Collagen additionally acts as an antioxidant and supports
the pores and skin and connective tissues. In different words,
enhanced collagen synthesis has wide-ranging well
being benefits. Our team of medical specialists are there for you in each step of the
way, from discovering the proper doctor and hospital to any kind of help.
4-8 weeks is ideal, beginning at 20mcg/day for the first
1-2 weeks, then increasing the dosage by 10mcg each 1-2 weeks (depending
in your chosen cycle length). This is lower than best
as far as results go, nevertheless it does allow you a break from the unwanted aspect effects when you discover you’re sensitive to
points like nervousness or insomnia. 25mg to 50mg per
day is an efficient starting point for new feminine customers of Primobolan. This permits you
to consider your tolerance and response to a low dose.
Nonetheless, a large, cross-sectional study discovered that the
charges of melancholy are low, at round 1 per cent. The reasons why
this is may be that the speed of depression is excessive in men who take
large doses of testosterone. This might relate to the
reality that a large proportion of drug users on this pattern had already undergone a
testosterone cycle prior to being examined for steroids use.
The best guess is to get involved in the neighborhood, including steroid users,
most of whom most likely aren’t overtly boasting about utilizing gear.
Non-public chats and boards will assist you to study the most effective and most secure way of buying
steroids to minimize authorized problems. Maintaining the use of milder PEDs like Anavar at low doses and for brief cycle durations is normally sufficient to
let you avoid clitoral enlargement. If changes
begin to develop, they’re usually reversible early on, so don’t ignore them.
However if allowed to continue developing via continued use of the steroids,
it could turn into so pronounced that the only therapy option will
be surgical. Enlargement of the clitoris because of the presence of extra androgen hormones is an alarming facet
impact but not uncommon in females who use high doses of potent
androgens.
During the reduce cycle, Winstrol and Anavar
preserve lean tissue and optimize fats loss. On the energy gaining
cycle, the athletes primarily apply oral steroids like Anadrol, Dianabol, and Trenbolone
to optimize positive aspects and/or recovery.
Anabolic steroids are well-liked amongst bodybuilders and athletes substitute for steroids speedy muscle growth.
When combined with weightlifting and vitamin, they’ll add lean muscle
mass past what could be achieved with coaching alone.
All of Dr. Emil’s products are produced from all-natural components, free of
dangerous components, and manufactured in the USA in a GMP licensed laboratory.
As a potent nitric oxide booster, it enhances blood flow, resulting in higher
vascularity, endurance, and coronary heart health. It is particularly
helpful for athletes and bodybuilders trying to enhance their efficiency and recovery time.
Another necessary benefit of VAR 10 is its capability to
help users achieve a hard, lean, and toned physique.
It also helps your body to extend red blood cell manufacturing to let your muscle tissue get more oxygen. This will boost
muscle manufacturing and strength whereas it delays the onset
of fatigue. The Crazy Bulk brand has established a agency reputation in the complement trade by creating dietary supplements that mimic the benefits of assorted anabolic steroids, without the damaging side effects.
The initial pre and submit effects of the first steroid cycle are
incredible after rigorous coaching, nutritious planning, and enough post-cycle therapy (PCT) remedy.
While this is a profit, for many users, the downsides will outweigh the dearth of liver toxicity, including
the high price of the product when considering the high dosages wanted to reap essentially
the most advantages. Many different anabolic steroids are modified
versions of the testosterone hormone, however despite only a minor chemical variation, they can provide you a
significantly completely different experience than Testosterone Enanthate.
As we count on, the constructive feedback from males who run a Testosterone Enanthate cycle focus on the quantity of lean features being made, the elevated power, and the increase in mental well-being and libido.
Muscle gains of 15lbs and up to 25lbs are a chance for
new steroid customers on Testosterone Enanthate.
Scientific doses of Testosterone Enanthate for TRT
will usually be 100mg to 300mg per week, primarily based
on the diagnosed medical wants of the patient.
Faux Primobolan will typically be Masteron or, in some instances,
Testosterone propionate, being offered as Primobolan. Your results and side effects
will differ, and this is typically the only way somebody suspects they’ve
been scammed with a fake product. If your Primo turns out to be Masteron, and you didn’t
get it tested earlier than utilizing it? The results will be similar, however Masteron typically has harsher unwanted side effects.
If you need results which might be past what Primobolan may give you by itself
(namely, getting ripped or making ready
for a contest), then stacking Primo with different PEDs is the next logical step.
Certainly, a variety of analysis reveals that HGH can be a potent burner of fat, especially cussed visceral fats.
If you should push past limitations and feel you’ve reached a brick wall with your progress,
HGH can get you previous that point and on to experience results that are not otherwise
potential solely with steroids. HGH is a subcutaneous injection somewhat than an intramuscular injection like anabolic steroids.
This makes it simpler to inject for most individuals as you aren’t
putting a needle into a hard muscle, which may be painful. As
An Alternative, the HGH injection goes just under the
pores and skin in part of the physique, where you presumably can raise a small roll of fats to inject.
In Contrast To another steroids, Anavar doesn’t trigger significant water retention, which implies you’ll look dry and outlined quite than bloated.
While Clenbuterol is not technically an anabolic steroid,
its fat-burning and muscle-preserving properties make it a cornerstone of many cutting stacks.
For greatest results, it ought to be mixed with
a disciplined food regimen and coaching program.
The oral type of Primobolan is preferable for anybody hesitant about injecting themselves with steroids.
Nonetheless, it’s well known that despite the compound
being the same apart from the hooked up ester, oral Primobolan is not quite as efficient because the injection, and
this can simply be as a result of how the physique takes it up.
This relative mildness is what makes it one of many only a few steroids for fat loss and
muscle gain (Edmund) that females can also use.
All anabolic steroids can probably cause every kind of negative impacts on the liver.
Some could be short-term solely while you’re utilizing the steroid, however others can prolong to a a lot longer-term health drawback – and
something involving your liver goes to be a critical health drawback.
Abusing any steroid, together with Winstrol, at too excessive doses or for too long intervals places
your liver at risk of injury. It acts as a stimulant, so potential unwanted aspect effects will have an result on everyone differently
– prepare to change the dose if required and monitor your blood strain all through
the cycle.
To get essentially the most out of Proviron in terms of physique hardness and muscle definition, you should already be lean whenever you combine it with
different AAS. If you’re not lean sufficient, you won’t be in a
position to discover the advantages – in different words, your physique fats
needs to be low sufficient to permit for muscular definition. Anadrole is less expensive to make use
of than Anadrol or just about any other anabolic steroid.
Most steroid customers will buy Anadrol on the
black market, but this nonetheless prices a big amount compared with the legal different.
You can do a full 12-week cycle of Anadrole for much less,
and no additional costs of medication are wanted because there
are not any unwanted side effects to counter and no PCT needed.
Apart From inaccurate dosing, poor-quality Anadrol merchandise may comprise different
anabolic steroids or other substances (unknown to you).
You should buy Anadrol and use it for 4 or six weeks and experience its full benefits during that brief
time. It’s usually used to kick start a cycle that
also contains injectable steroids because of how
fast Anadrol gets working right away while you anticipate the consequences of
the slower-acting injectables. Simply as the steroid Anadrol is greatest for kick-starting positive aspects firstly of a cycle and is usually utilized in a bulking cycle, the same applies to the Anadrole.
Different bodybuilding dietary supplements are more suitable
for cutting purposes than Anadrole. Nevertheless, if used on the front end of your bulking cycles, 100mg of Anadrol daily for 4-6 weeks
is likely the place essentially the most advanced users will
begin, combined with 1mg of Arimidex every single day to combat
unwanted aspect effects.
Novice customers ought to usually start with much
less potent compounds to acclimate their bodies to the effects of steroids.
As expertise and tolerance improve, they may consider more advanced cycles.
It’s not uncommon for intermediate and even some beginner steroid customers to assume
they’re ready to leap into a complicated cycle just because there are
a few steroid cycles beneath the belt.
If you have a high physique fat proportion, it could be
price slicing first or taking different steroids over Anadrol because of the bloating and puffiness that Anadrol can cause.
To maintain optimal ranges of oxymetholone in your bloodstream, it
is suggested to take two doses throughout the day (instead of one).
If girls have taken Anavar or Anadrol alone in cycles earlier than and want to construct more muscle,
they may stack both compounds collectively. The purpose
for this may be because of Anadrol concurrently growing estrogen levels whereas failing to bind strongly to SHBG (sex hormone-binding
globulin).
This stack is highly beneficial for individuals making an attempt steroids for the first time, a
perfect newbie bulking cycle. Such reductions in fat mass are one of many reasons why Anadrol can typically be used as
a slicing steroid. We have discovered that when users
adopt low-sodium diets, they’ll maintain extracellular water retention at bay
whereas growing intracellular muscle volume.
Anadrol is very similar to Dianabol, causing impressive power and muscle positive aspects (3).
Dbol enhances glycogenolysis (the breakdown of glycogen into glucose), providing the physique with a
relentless supply of vitality during intense exercises.
Its fast-acting nature means you’ll see noticeable outcomes nearly instantly.
Nevertheless, IFBB, the organization that oversees the competition, has often denied
the utilization of steroids in the competition. He was a 2 time
Mr. Universe champion, one of the few individuals to ever beat Arnold Schwarzenegger.
When he additionally won the IFBB Mr. America competitors the same year he
beat Arnold (1966), snatching victory from one other future Olympian-
Frank Zane. Fact be informed there was a time when Mr.
Yorton wasn’t all the time in the fitness center. He was in a automobile accident
shortly after highschool that damaged his left eye, forearm,
elbow, wrist, dislocated hips and shattered femurs.
Forward of the Hall of Famer being sworn in, a Pennsylvania man named Al
Thompson wrote a grievance to the Tennessee Legal Professional General and the Tennessee Bureau
of Ethics and Finance, and alleged steroid use by Kane.
Lidocaine is one other drug typically used if you end up getting a cavity crammed.
I’m sure lots of you reading this have used them in some unspecified time in the future.
It’s necessary to notice that steroid-free and drug-free are not
the very same factor. As we see in unwanted facet effects
like zits or excessive hair growth, all of these
unwanted effects are hormonally linked.
I personally find that my soreness is considerably decreased once I sip on BCAA
drinks during my exercises. Sure, certain steroids like Winstrol or Anavar are well-liked throughout slicing phases, particularly for preserving muscle mass while in a
caloric deficit. Each are extraordinarily well-tolerated and ideal for chopping or recomposition cycles.
You should pump iron, but you must always leave an excellent two reps within the tank on every set.
This means choosing a weight that challenges your target muscles
for the reps indicated, however avoids taking you to failure.
Does this mean it is okay to by no means sweat and to sit
down on the tip of a bench scrolling via your phone between sets?
But actual success is less about “giving all of it you got” and extra about having the flexibility to show up every coaching day in a performance-readiness state.
Moreover, consistency is the building block of depth – not the opposite way round.
The time period “natural.” on this context refers back to the commitment to attaining by way
of totally natural means. They rely solely on exercise,
food plan, and pure supplementation.
His approach to bodybuilding emphasised natural methods and techniques, highlighting the potential for
spectacular results with out the use of performance-enhancing medication. Through his dedication and dedication where to order
steroids online safely (liefdevollegeboorte.nl) pure bodybuilding, Bobby
Pandour helped establish a foundation for the game and impressed
future generations of athletes. His accomplishments in pure
bodybuilding have earned him respect and association with other accomplished
pure athletes.
Paul Kreuger is amongst the most fascinating tales
to ever come out of natural bodybuilding.
Kreuger would spend 25 years as an amateur bodybuilder, often competing
for enjoyable. Yes, there are some natural dietary supplements like creatine, protein powder, and amino acids that can help with muscle development
and restoration. Some of the largest natural bodybuilders are Ulisses Jr., Jeff Seid,
Simeon Panda, Calum Von Moger, and Chris Bumstead. Brandon Lirio is huge – and that is
something that no one may ever refute. With stats of
5’11” and one hundred ninety lbs., he’s undoubtedly rocking an especially lean construct – one which he had even method earlier than he began collaborating in competitions. He primarily possesses the dream body that nearly all ectomorphs purpose for, and this is on high of his unbelievable genetics that has constantly helped him together with his features since he was 12.
Anecdotal reviews recommend minimal unwanted facet effects, but overuse could probably lead to decreased stress response, fatigue, and low blood pressure due to chronically low cortisol ranges. Often assessing and fine-tuning coaching quantity permits bodybuilders to unlock their full potential in their health endeavors. While different variables actually matter, coaching quantity stays a pivotal factor in reaching health objectives effectively and effectively. Exceeding MRV can result in overtraining, causing fatigue, efficiency decline, and harm risk. Progressive overload is essential, but staying below MRV ensures sustainable gains when usining muscle steroids.
We have additionally included the legends of the sport who competed before the modern shortcuts and a few controversial selections who declare to be natural. Are you wondering who’re the best pure bodybuilders who built amazing physiques without any steroids, PEDs, or different drugs to spice up growth? If sure, this information will inform you about the best pure bodybuilders of all time.
Power coaching is a fundamental element of pure bodybuilding, serving to to extend muscle mass, increase metabolism, and enhance total bodily performance. Compound workout routines corresponding to squats, deadlifts, and bench presses are extremely efficient for building power and selling muscle growth. It’s essential to steadily increase the weight and intensity of your exercises whereas making certain sufficient rest intervals to keep away from injury and maximize muscle recovery. Incorporating a variety of exercises and workout routines can also help prevent boredom whereas maintaining your muscular tissues challenged. By focusing on power coaching with correct type and technique, natural bodybuilders can achieve important features in muscle dimension and definition with out counting on dangerous substances or shortcuts. Natural bodybuilding is a type of bodybuilding that emphasizes drug-free training and nutrition practices.
They would additionally train every body half with two
exercises of 3-4 sets, and 6-12 reps per set. This
approach was completely opposite to the later cut up routines the place particular person muscle groups are targeted on specific days.
The adverse media round steroids have led to a rise in natural bodybuilding’s recognition.
There is more to producing the physiques of the bodybuilding industry’s titans than simply weightlifting and maybe steroid use.
A vital pillar that provides the energy and structural elements
required for muscle growth and repair is vitamin. Here’s
an illustrative look into how legendary figures like Ronnie Coleman, Dorian Yates,
and Lou Ferrigno might have coupled food plan with their speculated steroid
cycles and intensive workout routines. Besides adding muscles to the
body, Trenbolone can effectively burn fats as well, as a outcome of its powerful and excessive andorgenicity ranges causing
atrophy of adipose tissue. Due to this high quality, additionally it is being used widely as a slicing steroid.
Consuming sufficient fats is crucial for total hormone growth
to assist your physique release extra HGH (Human Development Hormone).
At the same time, you carry out those massive
every day lifts and hit the hay at night.
Keep Away From strength-based packages such as 5×5 training and Stronglifts, which tend to have a
disproportionate quantity of higher and decrease bodywork that forgoes total muscular stability.
One factor to clarify golden eras legends such as Larry Scott,
Arnold Schwarzenegger, and Tom Platz all used performance-enhancing
medicine sooner or later of their careers.
A. With adherence to a great diet and health regimen, the end result
achieved by way of CrazyBulk products can be sustained
by individuals.
It is challenging to evaluate the efficacy of Deca Durabolin in isolation, as it’s usually mixed with other anabolic Steroids Drug.
Regardless Of this, we have observed decreased anabolism in customers
who remove Deca Durabolin from stacks. To put trenbolone’s androgenicity into perspective, its androgen score is 500, which
is five times greater than that of testosterone. Nonetheless, trenbolone does not induce aromatization, causing significant elevations in blood stress, that are attributed to huge
reductions in HDL. Androgenic unwanted effects are common with Anadrol,
regardless of its low androgenic ranking of 45.
We’ll ship you the newest training plans, videos, nutrition guides and deals.
He has climbed the Mr. Olympia pedestal a number of times,
and did especially well after his 2011 Australian Pro victory.
These genetics have helped Wolf to capture multiple titles during his
career, including the prestigious 2014 Arnold Classic.
The Mr. Olympia successful streak for Heath began in 2010, when he won the contest for the primary time.
One of the most potent bulking mixtures we now have
encountered is the cycle above. It combines three highly effective mass-building steroids
simultaneously, causing vital outcomes by way of muscular energy
and hypertrophy. Due To This Fact, cautious bodybuilders can improve their dose steadily to gauge their response to this drug within the early phases of a cycle.
Trenbolone has a stimulating impact on the central nervous system,
triggering thermogenesis and aiding fats burning. However, such stimulation can contribute to adverse effects, including
insomnia, anxiety, restlessness, elevated sweating, and even paranoia in delicate
customers. Despite its positive effects on physique
composition, trenbolone is considered one of the most precarious steroids we’ve encountered.
Arnold wasn’t the largest or best-conditioned bodybuilder of the late Nineteen Sixties.
Sergio Oliva, a Cuban émigré, was greater, and guys like
Bill Pearl seemed leaner and sharper. Recognized because the idol and mentor of the well-known ArnoldSchwarzenegger,
Reg Park was an enormous man who took out the 1951 Mr Universeand modified bodybuilding ever
since. His exercise routines have been easy – each was full body, based mostly on compound lifts and brutally intense.
Throughout the pre-contest phase, they lost 30–60% of their
physique fats, with a few bodybuilders dropping as a lot as 70%.
Regardless Of this drastic fat and weight reduction, most bodybuilders
managed to maintain their lean body mass while getting
ready for competition. Anavar (oxandrolone) is an oral anabolic steroid created in 1962 to advertise
lean muscle mass in these suffering from muscle-wasting situations.
The other main objective when formulating Anavar was to create a light drug
with few unwanted effects so ladies and children may safely take it.
Trenbolone is an active method that doesn’t cause any water retention. As A Substitute,
it creates a really dry and ripped body with exhausting lean muscle mass.
There are many top-quality professionals combating
to face on top of the Olympia pedestal, and be part of legends similar to Schwarzenegger, Yates,
Coleman, and Cutler. Nevertheless, Rhoden is a proud proprietor of numerous, including multiple IFBB Pro
victories including the Arnold Traditional. He is also one of the most well-liked athletes in the sport, and an influence to many new bodybuilders.
It just isn’t uncommon for users to achieve as a lot
as 10 pounds in the first week on Anadrol. Avoid any heavy ab routines (e.g., weighted crunches) and use your physique weight to
prevent excessive muscle progress for extra excellent definition. Ebenezer Samuel,
C.S.C.S., is the fitness director of Males’s Well Being and a
certified trainer with greater than 10 years of coaching expertise.
He’s logged coaching time with NFL athletes and track athletes and his current training
routine contains weight coaching, HIIT conditioning,
and yoga. Before joining Males’s Well Being, he served as a sports columnist and tech columnist for the
New York Every Day Information. Legal and safe steroids present individuals
with all the benefits of actual steroids. A. No, CrazyBulk products
are authorized steroid alternatives and do not require a
prescription.
Looking for methods to make the method easier is smart when you’re in this position. One of the options we’ve involves backfilling insulin syringes
for steroid injections. In brief, this methodology makes it
each less painful and extra handy to administer your injections.
Clenbuterol isn’t exogenous testosterone and thus is unlikely to
trigger any significant muscle or energy positive aspects in ladies.
Equally, it won’t shut down women’s natural testosterone manufacturing, so users won’t
undergo a decrease in libido. Ladies will also expertise noticeable lean muscle features as a end result
of its positive impact on nitrogen retention and protein synthesis.
We don’t endorse using anabolic steroids; nonetheless, we understand that
many women and girls are using these substances and need correct steering.
In Accordance to the social constructivist perspective, we’re born right into a society that constantly influences us where we
relate to present norms and conceptual frameworks (Goffman, 1959).
We are brought up in several gender roles, for example, how we ought to always gown, look and behave.
Traditionally, the hegemonic understanding of the feminine body is weak and fragile
in contrast to men’s which is each massive and strong. In addition, ladies’s look must also appear pure (Goffman, 1977).
When people are of the identical opinion, a common notion is fashioned that results in the creation of
beliefs.
In a means, it was like going into a “bubble” and completely ignoring
what was occurring outdoors the “bubble”. Of
course, I was a selfish particular person, a hundred % egocentric as a end result of I solely thought
of myself and possibly even ignored how the
youngsters have been doing. I thought it was
extra necessary to train than have time with my kids, it was scary that
it became so emotionless”. Every time I had the injection, I felt such anxiety in my body. I repeatedly checked my clitoris, I searched on Google and examine clitoris enlargement about 100 times”.
All anabolic steroids will skew cholesterol levels within the incorrect path, with LDL (low-density lipoprotein) rising and HDL (high-density lipoprotein) decreasing.
What units Anavar aside from harsher mike chang
Steroids (https://ragusaninelmondo.it/Media/pgs/dianabol_acquisto.Html) is that it delivers these results
with a significantly reduced danger of virilization when used at low-to-moderate doses.
Nonetheless, it is nonetheless a powerful hormone, and improper dosing or prolonged use can improve side impact threat.
That’s why females can rapidly put on lean muscle with
very low doses of anabolic steroids. Conventional conceptualisations of women collaborating in sport point towards a socially acceptable development of females having to subtly steadiness hegemonic femininity and athleticism [47].
Ainsworth et al. also highlight the delicate balance between remaining female
whereas participating in sports dominated by male athletes,
such as energy sports [48]. Women’s participation in energy sports
activities and the hyperlink to female empowerment seems to contribute to the salience of a
sporting context where they can reveal power and add muscle mass.
Plus, they’re reasonably priced options for newbies who’re
usually on a good price range. Nonetheless, we have discovered
it to be protected when taken in very low doses.
It starts to turn out to be possible to make use of HCG all through a cycle of this size,
however most guys is not going to need or want to use it for therefore long and as an alternative use
HCG in the path of the end of the cycle. Further
unwanted side effects not talked about on this list include aggression, anxiousness, despair, infertility, and insomnia.
Most imagine Trenbolone is a steroid with distinctive traits, nevertheless, it is extremely much like Parabolan. Negma Laboratories produced Parabolan in the Nineteen Sixties
which was made with the same active hormones as Finajet and Finaject.
Bodybuilders at present purchase Finaplix for the sole purpose of turning the pellets into an injectable trenbolone.
But by sticking with known, respected, and trusted sources,
you should have the flexibility to stay assured that
you simply won’t be throwing money at scammers or counterfeiters.
All steroid customers must pay close consideration to make sure that
blood just isn’t aspirated when inserting the needle.
If this does occur, the syringe ought to be utterly
withdrawn from that area and injected elsewhere.
There are three established methods of administering injections from a medical perspective.
Whereas it’s important to know these, we shouldn’t just
assume that we are able to use just any method for steroids.
A first-time cycle, like this one, can produce roughly 20 kilos of lean mass.
We have additionally seen strength increases of 30–50 kilos from customers on compound lifts.
A potential answer, brought forth by Jerry Brainum, is to legalize steroids
and implement better monitoring of these athletes.
This has prompted some researchers to suggest that
steroid-induced hepatotoxicity may be overstated.
Many case reviews involving anabolic steroid administration and hepatic cancers examined
People On Steroids Before And After Pictures (Lifesbestmedicine.Com) who had
been treated with oral steroids (17α-alkylated) for a number of years.
No cysts or tumors have been reported in athletes utilizing
17β-alkylated steroids. Relying on the bodybuilding goal, completely different oral steroids can be utilized.
Bodybuilding is carefully intertwined with steroid use and at all times has been – though ‘natural bodybuilding’ is gaining traction as a cleaner various.
By the early ’90s bodybuilders had been including insulin and human progress hormone to
the combination, giving them “that superhuman ballooned look,” says Bryan Krahn,
a writer and physique coach. One may be curious as
to why a compound similar to Trenbolone might not
essentially be included here.
Additionally, natural alternate options are legal in most jurisdictions, whereas steroids are not.
Half of the appeal of the Mr. Olympia competition is the spectacle, which depends on huge muscular tissues, wonderful conditioning, and
ridiculous competitions between physiques. Bodybuilding has a bad status for steroid use and abuse, with a lax method
to testing and a serious incentive for spectacle.
These medication would possibly lower the damage that occurs to muscular tissues
throughout a hard workout. Some folks also may like how their muscles look when they take these
drugs. HGH is much like Clenbuterol within the sense that it isn’t
an anabolic steroid. It’s broadly categorized as an artificial peptide hormone that aids in quicker
fat burning and a point of muscle tissue enlargement.
The latter is very evident in customers who
have taken some kind of testosterone-based steroid however have had low HGH ranges.
This method facilitates important positive aspects in muscle mass and strength whereas avoiding
the complexity of multiple compounds. In Distinction To men, feminine customers typically keep away from
injectable steroids like testosterone because of the elevated risk of virilization, which entails developing male traits similar to deepened voice
and facial hair development. Yes, misuse of steroids can lead to hormonal
imbalances, liver toxicity, hair loss, and other
critical health issues, along with potential authorized consequences in sports.
Such short-acting formulations are of specific concern in sport,
because the exogenous source of testosterone is rapidly eradicated
following cessation of treatment. Increased out-of-competition testing helps to
combat the cheat who is using short-acting preparations and ceasing administration prior to competition in anticipation of testing.
It is of curiosity that an illicit preparation known as
‘The Cream’ was designed for transdermal software
(see the part ‘Designer steroids’). Non-pharmaceutical water-based testosterone suspensions for
injection are marketed on bodybuilding web sites and cheats in sport could find these engaging as,
in principle, these must be relatively brief appearing.
Non-pharmaceutical-based preparations, whether or not oil or water based mostly,
may be a selected hazard to health as the contents might not have been prepared beneath sterile situations.
Chopping is an important part for a bodybuilder, where the objective
is to burn fats whereas retaining muscle mass gained from the earlier
bulk. It does not produce exceptional muscle hypertrophy; nonetheless, it’s commonly
utilized in bodybuilding and makes our top 5 list as a result of its
execs largely outweigh its cons.
This aesthetic attraction is often a key consider bodybuilding
competitions, the place contestants are judged based on their muscle size, symmetry, and total conditioning.
Steroids work by acting on androgen receptors which boosts muscle development.
Over time, these substances have gone via completely
different levels of acceptance and rules.
Taking steroids raises ranges of this hormone, which causes effects similar to increased muscle mass and
power (3, 4). In males, its levels improve throughout puberty to advertise the development of male intercourse traits,
corresponding to physique hair growth, a deeper voice, intercourse drive, and increased top and muscle mass.
To avoid masculinising side effects and over-large
muscles, the intake of AAS must be balanced.
Ladies are unsure about having the power to deal with this balancing act and reside
in a worry of shedding their femininity. They have an inner
limit for acceptable unwanted facet effects, so that they struggle to take care of the stability between fascinating muscle growth and
acceptable unwanted aspect effects. Not with the power to get pregnant, and permanent unwanted side effects similar to clitoral enlargement, elevated body hair or a deeper voice
frighten them.
Dosages differ widely depending on what situation the doctor is treating you for, and your total well being.
There are numerous both localized and systemic corticosteroids out there.
We used normal Cochrane Being Pregnant and Childbirth methods for information assortment and evaluation. Main outcomes included
perinatal death, neonatal death, RDS, intraventricular
haemorrhage (IVH), birthweight, developmental delay in childhood and maternal dying.
Prednisone unwanted side effects are widespread and can embrace insomnia, irregular hair
progress, fatigue, thinning of the skin, constipation, and extra.
Folks’s views on femininity are affected by traditions and
societal norms when it comes to look and appropriate clothes.
During a cycle, women will sometimes start taking 20–40 mcg
of Clenbuterol a day. Then, every 3–4 days, customers increase
their dose by 10–20 mcg, for a cycle size of 4–6 weeks.
In this regard, additional studies are wanted to evaluate the epidemiology
of antisocial conduct associated to AAS assumption and
the relationship with other drug consumption. Stopping prednisone abruptly isn’t a good suggestion,
especially if you are taking more than 10 milligrams (mg) a day or have been on it for more than three weeks.
This is because your body will have turn into accustomed to having
the cortisol substitute in your system and not produce cortisol on its own. While you
would possibly be on prednisone, the body reacts to it in the identical method as it would to cortisol, inflicting you to be wide awake if ranges
within the body are excessive.
The drugs may be taken by mouth, injected into a muscle, or utilized to pores and skin as
a gel or in a patch. Nonetheless, if users are consuming copious quantities
of alcohol on-cycle, taking toxic medicines, or stacking
Anavar with different orals (such as Anadrol or Winstrol), then cirrhosis or peliosis hepatis are each possible.
Realistically, women typically construct roughly 12 lbs of muscle from their
first Anavar cycle, in our expertise. This could have
a noticeable impact on muscle hypertrophy as nicely as enhance muscle definition. Moreover, Anavar
is an oral dbol steroid cycle, which
is preferable to injectable steroids (for many women).
However, non-medical use for physique or efficiency enhancement is prohibited in most countries and is banned
by all main sports organizations, together with the World Anti-Doping Agency (WADA).
For milder formulations, longer use could additionally be applicable under a doctor’s
steering. Prolonged use of topical corticosteroids can lead
to pores and skin atrophy, striae formation, and different adverse results.
It’s essential to follow your dermatologist’s instructions and use the bottom effective power for the shortest needed
period. Whereas anabolic steroids have reliable medical makes use of, they are
frequently misused because of their muscle-building and performance-enhancing effects.
It is favorable amongst women as a result of its low androgenic rating (44-57),
thus inflicting a low threat of virilization. Nonetheless, if a woman stops her steroid cycle as quickly as virilization signs occur, they
usually shortly diminish and are reversed. Such
signs occur slowly over a time period; thus,
it isn’t a case of waking up one morning and having grown a beard.
The greatest steroids for women are primarily the compounds that don’t produce
virilization effects. The truth is steroids have triggered extra severe side effects on girls
than they do men. There other alternatives including authorized steroids for women that
supply similar benefits with out the side effects.
The liver and kidneys process oxandrolone earlier than its entry into the bloodstream, causing some hepatic stress, as demonstrated by the elevation of AST and ALT liver enzymes.
Steroids can lead females into developing male features such as facial improvement of hair, voice deepening, and masculine-pattern balding.
In Accordance to Dr Mukesh Batra, Padma Shree Recipient, Founder and
Chairman of Dr Batra’s Group of Corporations, the CDC’s 2017 Youth Danger Behavior Surveillance Report, 2.4%
of feminine students have used steroids in some unspecified time within the
future. Even though that number appears insignificant,
it translates to about one in every 42 teenage women. Additionally, mismanagement of corticosteroid
dosages or taking an excessive amount of of the medication may lead to menstrual changes,
including skipping periods, based on MedlinePlus.
This misuse can significantly affect physical health, but steroid use can also have an result
on the brain, habits, and mental health. But anabolic steroids improve the male sex hormones among girls that start developing male-like characteristics like the development of facial hair.
The concern of whether endogenous hyperandrogenism in feminine athletes as a
result of certain medical issues imparts a “competitive edge” in sporting events
stays unresolved. The case of Ms. Semanya (and
other athletes) has paved the greatest way for necessary discussions regarding the
privacy rights of female athletes as well as fairness in competitors in sporting events.
Evidence from this updated evaluate supports the
continued use of a single course of antenatal corticosteroids to speed up fetal lung maturation in ladies vulnerable to preterm birth.
His dedication to an intensity-driven exercise and high-calorie food regimen,
amplified by steroid-assisted muscle progress and restoration,
echoes the Schwarzenegger approach, manifesting in a equally spectacular muscular stature.
Coleman adopted a” massive consuming for giant muscles” philosophy,
consuming a massive food regimen particularly designed to fuel
his powerhouse efficiency and potential Dianabol-assisted
physique transformation. Advanced cycles are extremely individualized, with
doses adjusted based mostly on private response,
targets, and the addition of ancillaries to keep away
from unwanted side effects. Ronnie Coleman’s hulk-like physique and eight Mr.
Olympia titles suggest a steroid-rich narrative.
Though he never publically acknowledged its use, his confession of having used
steroids and Dianabol’s widespread reputation throughout his glory days trace
at its potential utilization.
Some folks will expertise unfavorable impacts, largely joint ache, complications, and flu-type signs.
Some folks won’t expertise any adverse results in any respect when using HGH.
More severe unwanted effects are likely to happen at very high doses or when HGH is used regularly for years, and this is to
be prevented.
Maintain away from people who have hen pox or shingles whilst taking steroids if you have by no means had these
illnesses. Steroids can disguise or change the indicators and signs of some
infections. They may additionally make it harder for your body
to deal with an infection.
HGH customers usually report headaches and different
symptoms just like flu. These are often very short-term and infrequently subside inside a
short while of beginning HGH use. Transferring these cussed
pounds across the waist is simpler if you’re lean.
Scientifically, glucocorticoids are a specific subgroup of
corticosteroids. However they’re commonly used as interchangeable names
for a similar sorts of medication. Your provider will recommend the best otc steroid treatment for
you, it does not matter what they name it. They’re artificial
(human-made) medicine which may be just like cortisol, a hormone
your body naturally produces. Corticosteroids have a similar anti-inflammatory impact
all through your body, however in a means your supplier can change and regulate to fit your wants.
Additionally, if a joint is already severely destroyed, injections usually are not likely to provide any benefit.
For instance, in an otherwise wholesome person, tendinitis may be adequately treated with only a steroid injection into the inflamed space.
However, in a person with rheumatoid arthritis,
injections are usually a small part of a multifaceted remedy strategy.
Anabolic steroids can be given by injection, taken by mouth, or used externally.
In the U.S. they are primarily categorized
as Schedule III Controlled Substances due to the
chance of serious adverse results and a excessive potential for abuse.
Oral (by mouth) corticosteroids are taken daily, often for short durations of time.
For the most effective outcomes, take these drugs at the identical time every single day.
Topical steroids are typically combined with other components, corresponding to antifungal or antibacterial brokers.
These include bone marrow stimulation in leukemia,
aplastic anemia, kidney disease, progress failure, loss of appetite,
and loss of muscle mass in malignancy and acquired
immunodeficiency syndrome. Anabolic steroids are illegally utilized by
athletes at all ranges in sports activities, such as bodybuilding,
weightlifting, baseball, soccer, biking, wrestling, and lots
of others, to enhance their performance.
Suppliers would possibly refer to cortisone pictures or steroid injections with the shortened time period “steroids.” This means
any manufactured medication that reduces swelling in your physique.
If you’re averse to utilizing needles (intramuscular injections)
then completely, Legacy has got you coated.
We sell Orally activated steroids like Anadrol, Anavar, Dianabol and and so forth, making certain that everybody
that wishes to make use of Canadian Anabolics, can. Kesimpta (ofatumumab) is used to treat relapsing types
of multiple sclerosis. Dupixent is used to treat eczema, eosinophilic or oral-corticosteroid-dependent
bronchial asthma, continual … Measure liquid medicine with a particular dose-measuring spoon or medicine cup.
If you do not have a dose-measuring system, ask your pharmacist for one.
The affordable costs of the buy legal steroids online [https://Www.joecustoms.com/ads/pages/what-are-good-steroids.Html] steroids Australia on the positioning are for genuine merchandise, and you may contact our customer
service workers with any questions by way of the Contact Us part of our website.
Before buying any drugs at our specialized sports activities pharmacology store, we offer
you a free full session. The only method to make use of
steroids legally is to have a prescription for them.
This stack can additionally be tailor-made
for intermediate steroid users, with higher testosterone dosages being
utilized.
At Legacy Laboratories, we’ve made purchasing for quality steroids and supplements in Canada very simple.
If you’re in want of top of the range steroids, SARMs or dietary
supplements like Trenbolone Acetate, Anavar, or other efficiency enhancing supplements, we’ve received you lined with just some clicks.
Even better, we respect your privateness and ensure your purchases reach you thru discreet, nationwide shipping.
Steroids additionally improve your state of mind and improve stamina.
You cannot develop stronger muscle mass with out endurance and stamina nevertheless if you finish up working
together with your goal, it’s easier to obtain distracted.
Examine reveals that males with low testosterone levels are vulnerable to lift body fat,
decreased energy, and muscle mass. On the various other hand, in case you have a higher testosterone diploma,
every little thing is rotated.
For instance, when steroids attach to androgen receptors within the hair follicles
they will promote facial hairs. Analysis on highschool athletes reveals they’re less prone to misuse anabolic
steroids if their family and friends disapprove. Some people “cycle” their anabolic steroid use by taking the medicine for some time after which pausing for some time before they
begin them again. Another method called “stacking” involves taking more than one kind of anabolic steroid at a time in hopes that this will make the medicine work higher.
You will be in a position to raise extra weights
in the fitness center and in addition due to this, burn extra calories.
The more energy you shed, the a lot more fats you will definitely lose.
For instance, if you’re occurring 12 weeks cycle, there must be a minimal
of four weeks of off-cycle.
Prednisone could cause low start weight or delivery defects if
you take the drugs during your first trimester.
Inform your physician in case you are pregnant or plan to
become pregnant whereas using this medicine. You should
keep away from taking prednisone when you have a fungal an infection that requires oral antifungals.
Topical antifungals will not be a problem, but at all times let
your physician know what medicines you’re taking earlier than starting this medicine.
Whereas one nation could possess a certain law, and
it’s happened greater than once, in a single day it can flip like a light-weight change, and it is
probably not in your favor. For this cause, if you’re considering a purchase order or any sort of anabolic steroid
associated activity, it is vitally essential you familiarize yourself with
the present legislation. Even so, we’ll give you a strong
basis to go by, a strong foundation that will give you confidence in having
the flexibility to reply these questions.
Testosterone can increase the anticoagulant motion of
warfarin.[18] Serious bleeding has been reported in some patients with this drug-drug
interaction. Although the mechanism is unclear, testosterone could cut
back procoagulant elements. Reduction of warfarin dosage
could also be essential if testosterone therapy is coadministered.
The most powerful oral steroid we now have seen by method of building muscle and gaining colossal energy is oral trenbolone, otherwise
generally known as methyltrienolone.
Testosterone can be the best exogenous androgen for the palliative therapy
of carcinoma of the breast in postmenopausal girls. Anabolic steroids, derivatives
of testosterone, have been used illicitly and are now managed substances.
Testosterone, like many anabolic steroids, was categorised as a controlled
substance in 1991. Testosterone is administered parenterally in common and delayed-release (depot) dosage types.
In September 1995, the FDA initially permitted testosterone
transdermal patches (Androderm); many transdermal
types and types are now available including implants, gels,
and topical options. In Could 2014, the FDA permitted
an intranasal gel formulation (Natesto).
Some formulas supply a higher daily worth of the components inside, bringing higher outcomes.
Verify this daily value with the really helpful restrict and see if these two complement one another.
Taking an ingredient worth more than the really helpful limit is unsafe for the
person. With greater than 10 years of experience in the well being complement business, Wolfson Manufacturers is
proud to present the best-selling testosterone chemical structure boosters—trusted by 1000’s and out there on-line or OTC.
These highly effective formulas are designed to ship
noticeable, transformative outcomes. Utilization Guide- The company
has talked about clear details on utilization and daily dosage planning.
We see them expertise greater happiness and success with pure dietary supplements.
Different natural supplements, such as protein powders, creatine, and BCAAs, won’t
yield steroid-like results. Current research suggests such herbs and amino acids exhibit positive results on testosterone ranges (7); nonetheless, they’re unlikely to cause distinctive elevations.
With the best combination of diet, train, and rest,
these authorized steroids might help to maximize your muscle development and shortly assist
you to reach your required fitness targets. Legal steroids are designed to provide the similar muscle and strength-building advantages as actual anabolic steroids with none
of the dangerous unwanted facet effects. Men who
use anabolic steroids are sometimes involved with elevated aggression and temper modifications as a facet effect,
but HGH works differently from testosterone. HGH itself might help improve
mental well-being and temper when used at sensible doses.
Usually, for a lot of the males, the dosage is one 1ml injection every three weeks.
Anyway, your doctor is the last particular person to determine the suitable dosage for
you. The overdose won’t be good in your well being, and it will cause some signs.
These signs include- Uncontrolled and frequent erections
A sudden increase within the number of purple blood cells within the blood.
Medicines are primarily made of chemical compounds, and that’s why none
of those is free from unwanted effects.
However, which legal steroid you choose to stack it with will rely in your goals.
D-Bal was formulated by Crazy Bulk to replicate Dianabol’s constructive effects however without the opposed effects.
This enables bodybuilders to stay wholesome while constructing
muscle, instead of destroying their well being within the
short or long run. There is a large demand for anabolic steroids proper now; however, not everybody wants
to break the legislation or endure the intense well being consequences
that include taking steroids. SARMs are currently categorized as investigational drugs and usually are
not approved for human consumption by the FDA.
This means that SARMs cannot legally be offered as
dietary dietary supplements or for medical use.
There aren’t any dangers of creating masculine options as
with steroids, however women need to be cautious of not over-using HGH to the point where the hands, feet, and
different components can start to become noticeably enlarged.
For extra superior fat loss and muscle features, some ladies will stack HGH with Anavar,
which is taken into account probably the most female-friendly steroid.
I would aim for a minimum of 12 weeks if muscle growth is your main objective; in any other case, it’s not worth the price.
For fat loss, general rejuvenation, restoration, and different low-level advantages are your
goal?
Treatment of HGH deficiency is probably considered one of the
primary medical makes use of for artificial
progress hormone. HGH can be used to help with muscle wasting-related circumstances like HIV, the place the
patient can in any other case battle to maintain and achieve lean muscle weight.
Victims of burns are potential beneficiaries of HGH as properly
due to its excellent capability to advertise collagen synthesis.
Research suggests that prohormone supplementation during resistance training doesn’t enhance testosterone levels
or increase muscle acquire and will lead to
negative well being consequences. Almost all prohormones available on the market have
been banned when the Anabolic Steroid Control Act of 2004
was amended. The act said that each one prohormones on the market were thought-about unlawful “managed substances,”
and that using them was the same as taking androgenic-anabolic steroids (AAS).
HGH is not an anabolic steroid, although it mimics a quantity of of steroids’ properties,
similar to fat loss, muscle hypertrophy, strength, and endurance.
We looked at how much of every ingredient was used to verify it is protected and efficient.
We solely advocate dietary supplements from producers that include
ingredients in quantities which are efficient. Good manufacturing practices, or
GMPs, are established to ensure product quality. Look for these certifications in the products you buy to guarantee their safety and quality
following consumption. It’s additionally necessary to
note that there are numerous safe and natural
ways to enhance athletic efficiency, such as correct coaching, nutrition, and relaxation. And it’s all the
time higher to concentrate on these methods earlier
than serious about using any complement. A good pre-workout not only energizes
your physique but additionally sharpens your focus and enhances endurance.
If you’re severe about bodybuilding and need to get the most
out of your workouts, DBulk is worth trying. After per week of taking it, I began to expertise explosive power and shorter
restoration times, making my exercises far more productive.
Testo-Max is a natural, legal, and protected different that provides you all
the benefits of Sustanon with out the unwanted effects.
Let’s look at tips on how to recognize a authorized steroid from an unlawful one, what precautions to take when you plan to use authorized steroids,
and what different confirmed methods you must use to construct
muscle and energy. This doesn’t imply that there are no merchandise out there that may allow you to with your objectives.
There are loads of authorized steroid options that may help provide you with a competitive edge.
Now, we all know that HGH is the holy grail of hormones
when it comes to constructing muscle, burning fats, and reversing the results
of getting older. However here is the kicker – HyperGH14x helps
you increase your HGH ranges with out the need for costly and dangerous injections.
Bear In Mind, as with all powerful muscle constructing
complement, Testol one hundred forty works best
when combined with a stable coaching program and proper diet.
It Is not a magic capsule, however quite a device to amplify your efforts in the gym.
Used responsibly, Testol 140 may help you achieve the sort of transformation that used to
be attainable only with hardcore steroid cycles. While traditional
steroids would possibly take weeks to kick in absolutely, customers of Testol one hundred forty
usually report feeling its effects inside days.
This fast onset means you possibly can take advantage of shorter cycles, reducing the overall strain in your body.
However, out of all anabolic steroids, we’ve found testosterone to be the most
cardiovascular-friendly. Such reductions in fat mass are one of
the reasons why Anadrol can typically be used as a chopping steroid.
We have found that when users undertake low-sodium diets, they can hold
extracellular water retention at bay while growing intracellular muscle quantity.
Creating a secure and efficient steroid stack entails extra than just choosing the
right compounds — it requires consideration to cycle size,
dosage, and on-cycle well being support.
Well, I’ve tried plenty of “T boosters” prior to now and none of them got
here near delivering the way that Improve does. You’re going to note huge efficiency increases
virtually right out of the gate, too. Combine ¼ cup
of household bleach (typically incorporates 3-6% chlorine on the time of manufacture) right into a full grownup bathtub of
water (40 gallons). Bleach baths ought to last roughly 10
minutes and should be carried out two to three occasions weekly.
Because Dianabol is stronger than the opposite two steroids on this list, the above cycle could be performed as a warm-up cycle before hitting larger doses.
Beginners will gain around 15 kilos with this cycle,
which is plenty of muscle for the way modest the doses
are. The major drawback of operating this cycle is the increased endogenous testosterone suppression post-cycle; however,
this might be corrected with an efficient PCT. Anavar (oxandrolone) is arguably the most secure
of all steroids for newbies, with it failing to cause excessive levels of cardiovascular and hepatic strain.
It puts the physique “on alert.” Continual ache causes the adrenal gland to be
in a continual “alert mode,” secreting cortisol as
would happen with an an infection or when an individual is being robbed.
Cortisol levels are alleged to be low at nighttime, placing the physique within the sleep mode.
Corticosteroids, similar to cortisone and prednisone, have an antagonistic impact
on bone and soft tissue healing. Corticosteroids inactivate vitamin D, limiting calcium absorption by the gastrointestinal tract
and growing urinary excretion of calcium.
He has been a board-certified MD since 2005 and
provides steerage on harm discount methodologies. Equally, there are
natural bodybuilders content with competing in low-profile competitions with minimal prize cash.
Testosterone boosters comprise natural, FDA-approved ingredients and are
authorized; thus, they are often simply bought on-line or over-the-counter.
As probably the greatest authorized steroids, this supplement aims to improve protein synthesis,
nitrogen retention, and overall muscle growth. It additionally targets enhanced
strength, permitting users to lift heavier weights and carry out better throughout exercises.
When combined, these legal steroids create a synergistic
impact that’s actually exceptional.
Don’t cease at intense exercises, and stick with a healthy and balanced food
plan. Testosterone is vital for protected steroids, leading with
merchandise like Testo-Max (Official Web
Site — Verified ✅). Those who need to add serious muscle mass however don’t need to be burdened with the baggage that
comes with anabolic steroids should contemplate steroid alternate options.
Where anabolic steroids convey with them a laundry record of
potential unwanted side Psychological Effects Of Steroids (https://Sermonquotes.Com/), alternate
options like those listed above convey just about none.
These steroids will be ranked in order of efficiency from 1 to five, with 1 producing the most effective results.
Many customers select to run one or both SERMs relying on their cycle length and compound intensity.
Blood tests give you a real-time snapshot of inside stress, hormonal suppression, and systemic influence.
Beneath are good, goal-specific pairing strategies that
can help you build an efficient and sustainable stack.
It impairs the immune system’s capability to reply to any harm inside that tissue for 3 to 6 months, or so long as it takes for the immune system to recover in the
space. TestoPrime is made with the most effective components for enhancing testosterone, corresponding to D-aspartic acid,
fenugreek, ashwagandha, Panax ginseng, vitamin D, zinc, and vitamin B6.
These dietary supplements all are available pill form, so it’s simpler so
that you simply can take them. If you want to pack on muscle
and improve your vascularity, Winsol is your new best friend!
Organizations like the American Academy of Pediatrics stress the must be cautious with steroids.
Make sure to observe the law and put your health first when planning your cycles.
With WADA watching and many sports activities groups
following their rules, you want to be careful to keep away from hassle.
It is clear that AAS use is a world concern, with analysis emerging from low–middle
revenue international locations all over the world
in addition to industrialised high-income states. Interventions will must be tailor-made to
fulfill the numerous characteristics and motivations of users,
going beyond those trying to obtain a stylised “bodybuilding appearance” or excel at sport or even the
young males making an attempt to bulk up. Evidence from the United Kingdom indicates that there are as many AAS users over forty years of
age as there are those under the age of 25 years [31].
Apparently, although the above-mentioned masculinizing unwanted effects of AAS have
been reported to be undesirable by the majority of feminine athletes, they nonetheless thought-about AAS use acceptable as a outcome
of their ergogenic effects (Strauss et al., 1985). In addition to masculinizing adverse effects, severe life-threatening opposed effects of AAS have also been reported amongst feminine
athletes, including hepatic rupture, multi-organ failure and sudden demise (Nieschlag
and Vorona, 2015a; Povzun, 2016; Thiblin et al., 2009).
AAS abuse within the Usa has been steadily increasing
up to now 40 years (22). Although competitive athletes had been among the many first groups
of individuals described to be abusing AAS for their purported performance-enhancing
results, AAS abuse spread to the final population at giant by
the 1970 s (23). Interest in AAS elevated in the 1990 s because of improved consciousness of the prevalence and opposed effects of AAS within the population, culminating in the Anabolic
Steroids Management Act in 1990 which added anabolic steroids to the listing of scheduled III substances (11).
A 2013 research that pooled knowledge from 10 earlier research
estimated a complete of two.9–4.0 million people used AAS between the ages of 13–50 years (24), placing the overall lifetime prevalence at
over 1% (25). 2 exhibits the impact of T administration on otherwise eugonadal rabbits, which performed
or not bodily exercise.
The decomposition of complete power revealed that the non-electrostatic interactions,
corresponding to van der Waals (Evdw) and electrostatic interactions (Eele), were primarily favorable.
However, the vitality contribution to the solvation had been discovered
to be unfavorable for binding throughout the tested protein-ligand complexes.
This comprehensive binding vitality analysis suggests secure and
favorable energetic mechanisms driving the molecular
recognition between Ecdysterone and the target receptors.
In this context, this study is aimed at the in-silico exploration of the binding and interactions of Ecdysterone (Fig 1) with Androgen Receptor (AR), Estrogen Receptor alpha (ERα) and Estrogen Receptor beta (ERβ)
to be able to explore their atomic-level effects.
They described a case of a 24 year-old weightlifter with AAS dependence and extreme depression, who developed suicidal ideation after AAS withdrawal [73].
From every electronic database we read all titles and chosen those promising to
be relevant, which had been 64. Subsequently, we learn abstracts and downloaded the total text of these actually relevant, which amounted to 60 articles.
In those with an higher arm circumference
greater than 33 cm, systolic blood strain was eight.2 mmHg greater utilizing cuff
measurement M compared with cuff measurement L. As a result, 33% of the subjects could be classified as hypertensive utilizing the – inappropriate – cuff measurement M, whereas only 12% would be categorized as such
utilizing cuff dimension L. It ought to be noted that cuff measurement was adjusted in accordance with upper arm circumference
in the HAARLEM examine, and thus the results weren’t affected by
this problem (46). Orally ingested AAS are rapidly absorbed within the gastrointestinal (GI) tract, with serum concentrations peaking
1–2 hours after ingestion of methyltestosterone (8).
With Out structural modification to withstand first-pass metabolism, a big
fraction of the absorbed AAS will be metabolized earlier than leaving the liver and re-entering the circulation. For instance, after oral administration of 25
mg testosterone, lower than 1 mg (4%) turns into systemically out there (9).
The oral bioavailability of AAS could be elevated by making
the parent molecule extra lipid-soluble by the esterification process described in the previous paragraph.
A 25-year-old man, who had been involved in bodybuilding, martial arts, and illegal boxing
matches or different fights and had used AASs because the early adolescence, underwent an involuntary psychiatric hospital admission for a
manic episode. He had a previous history of psychotic melancholy and was identified with
substance-related bipolar dysfunction, attributed to AAS use.
Thus, a analysis of AAS dependence was hypothesized
and the resemblance with opioid dependence was underlined.
When sperm parameters had been evaluated, reduced total sperm
count and sperm morphology have been noticed in abusers, when compared to controls (Table 3 and Supplement
Fig. 3A, 3C). In addition, a pattern in the path of a statistically vital discount in sperm concentration in abusers was also detected (Supplement Fig.
3B). Insufficient data were out there to research other sperm parameters (not shown).
In any occasion, nevertheless, there’s reason to suspect that the prevalence of
clinically vital AAS dependence may be growing. This
impression relies on the statement that the imply age of onset of AAS dependence in the above research seems to
be within the late 20s. Therefore, opposed
psychiatric and medical effects of extended AAS dependence
would likely not floor till age 30 or later (1, 9). When it’s thought-about that illicit AAS use did not turn into widespread
till the 1980s, as discussed above, it follows that inside the subgroup of
AAS customers who have developed persistent use, many are only now growing sufficiently
old to show clinically significant AAS dependence.
Subsequently, as new waves of latest youthful AAS
users reach their 30s and 40s, the prevalence of AAS dependence may continue to rise.
This signaling by way of the AR has additionally been noticed to
work together with Notch signaling (22). Conversely, the artificial androgen analog Nandrolone Decanoate (ND) has been observed to reduce Notch activity
whereas growing Numb activity, highlighting the discrepancies of androgens
on target outcomes (22). In our clinic, the reasons to go to were largely related to signs indicating disrupted gonadal perform,
similar to loss of libido, erectile dysfunction, low power, depressed temper, subfertility and gynaecomastia.
As lengthy because the affected person refrains from anabolic
steroids, we deal with him in accordance with applicable guidelines.
In the Netherlands, as in most different European nations, anabolic steroids, corresponding to testosterone, can solely be obtained by
way of a pharmacy with a doctor’s prescription. Since most docs aren’t keen to prescribe legal steroids muscle growth for
efficiency and image-enhancing purposes, most steroid abusers are depending on illegal suppliers.
ND triggered the expression of HBS1, GAL, ADAMTS1, SERPINE1, NR4A1-3, ATF3, BTG2, TCF4, and USP 12 to be downregulated at seven days post-administration in male Wistar-Hannover rats however
upregulated at 35 days post-administration (31).
TPM, BCL6, TLE1, and UBE2E2 were downregulated at both seven- and 35-days post-administration in male Wistar-Hannover rats (31).
BHLHB3 and SFRS10 expression was upregulated at seven days post-administration in male
Wistar-Hannover rats however downregulated at 35 days post-administration (31).
ND affected overall TGFB1 mRNA ranges in 7.5-week-old matched mutSOD1 and NTg mice (11).
This article has explored the historical past of steroid development, from its early pre-steroid
use to its first artificial form in 1935. We have appeared on the influence of steroids on sports efficiency and the
ethical considerations surrounding their use.
We have additionally seen how fashionable steroids differ from their old-school counterparts, both in phrases of
their chemical construction and the effects they have on the body.
When Heath, Kai Greene, and Branch Warren take the stage in Las Vegas, their our bodies will glisten with the sheen of superhuman perfection. Their fat-free mass indexes might
be unimaginable for well-meaning amateurs like myself to copy.
A Lot shall be stated about the exercises the opponents perform—seven hours a day in the fitness center,
1000’s of repetitions of assorted exercises—with no point out of the chemicals that
make these workouts potential. Anabolic steroids loved a free interval of flourishing use and research and growth till the 1988
summer season Olympic Games when Canadian Olympic sprinter Ben Johnson tested
constructive after his victory at the 100 meter sprint. This would be the swan track for the freedom and legality
of anabolic steroids within the United States and the first part of the control positioned on anabolic steroids.
The 1988 Olympic steroid scandal sparked a congressional listening to on the problem of anabolic
steroid use, and it was throughout this yr that
anabolic steroids were positioned underneath the Controlled Substances Act within the United States.
Although this didn’t make possession and use a legal illegal
act, it removed the liberty to brazenly purchase anabolic steroids without a prescription.
It is very important to understand that anabolic steroids are
authorized in most countries in the world, and that in plenty of countries it isn’t unlawful.
The Us of America is doubtless one of the solely nations
on the earth to implement strict and stringent draconian laws concerning anabolic
steroids. For instance, in Canada anabolic steroids are positioned under Schedule IV in the
Canadian Managed Medication and Substances act the place personal possession and use is authorized and not
an offense. Prior to 1996 in Canada, anabolic steroids have been freely obtainable for
use and consumption. This now made it an illegal criminal offense in the Usa to possess, use, purchase, and sell anabolic steroids and
not utilizing a valid prescription. During the
Bronze Period of bodybuilding, the idea
of using performance-enhancing medication like steroids was
nonexistent.
This is the place the Soviet Union would decide up the place Nazi Germany had left off at the war’s end.
The Place they found that artificial forms of testosterone might improve troopers to increase their
capabilities, it was a simple and effective method to improve bodily efficiency.
Steroids have a wide range of reliable medical makes use of,
including the remedy of cancer, HIV/AIDS, and
anemia. They can also be used to treat certain kinds of arthritis
and joint ache, in addition to to assist pace up restoration after surgical
procedure or an injury. Nevertheless, steroids can additionally be abused for non-medical purposes, such as to
enhance athletic performance or to improve bodily appearance.
Steroids are usually made from cholesterol, which is discovered naturally within the physique.
Ldl Cholesterol is transformed right into a steroid molecule
via a collection of chemical reactions, which involves enzymes
and other proteins. There are lots of of several types of
steroids, all of which have completely different properties and results.
Some of essentially the most commonly used steroids embrace testosterone, nandrolone, and oxandrolone.
This raises questions on societal body image requirements and the dangers people are willing to take for aesthetic enhancements.
In 1953, a testosterone-derived steroid generally known as norethandrolone (17α-ethyl-19-nortestosterone) was synthesized at G.
Testosterone where Can i Buy Legal Steroids be administered
parenterally, however it has more irregular prolonged absorption time and larger activity in muscle in enanthate, undecanoate, or cypionate ester kind.
In addition, as a result of estered testosterone
is dissolved in oil, intravenous injection has the potential to cause a dangerous embolism (clot) within the bloodstream.
Made from naturally fed, hormone-free cow’s whey, 100 percent Grass-Fed
is clean of synthetic sweeteners, meals dyes, gluten, and preservatives.
The development of those purposes demonstrated the numerous therapeutic
value of steroids, which extended into treatments for menopause, osteoporosis, and
even certain types of breast most cancers, reflecting a broad utility
across diverse medical fields. Compounds corresponding to
methandrostenolone (Dianabol) and nandrolone decanoate had been synthesized in the Nineteen Fifties and
1960s, additional fueling steroid use in professional and newbie sports activities (Kicman,
British Journal of Pharmacology, 2008). Every of those compounds offered unique profiles for muscle progress, restoration, and performance
enhancement, with various danger levels of unwanted effects like liver pressure,
hormonal imbalance, or cardiovascular stress. After the fall of the Third Reich, the
Soviet Union showed interest in the new hormone. Soviet athletes were the first to make
use of steroids to extend muscle mass and energy.
The USSR and Jap European international locations used steroids to improve efficiency in bodybuilding competitions
(4).
At the base of the article each reference might be linked to
a peer-reviewed research or paper. This article is based on scientific
evidence, written by experts and fact checked by professionals in this field.
Grimek’s impact extended past his victories; he played
a crucial position in shaping the ethos of the Silver Era, emphasizing the significance of coaching for health and
longevity, not just aesthetics.
Steroids have been round for centuries, with the primary recorded use courting
back to historical civilizations. The time period “steroid” refers to a category of
molecules that includes hormones, vitamin D, and cholesterol, amongst
others. These molecules are characterized by their
four ring construction and have a variety of functions within the body.
In this text, we will explore the history of steroids, from
their historic origins to their modern makes use of in drugs.
The ethical dilemmas surrounding steroids in sports activities continue
to impress debate. Whereas some advocate for the proper of athletes
to use steroids underneath medical supervision, others argue that this undermines the spirit of truthful competitors and exposes athletes to potential well being dangers.
The ongoing controversy highlights the complicated steadiness between enhancing efficiency and sustaining the integrity and safety of
sports activities.
If there’s nonetheless any method left after that time, you presumably can spit
it out and rinse it with water. Does it matter if you’ve
eaten breakfast before taking your first dose for the day? No, it’s not thought to make a distinction whether or not your
abdomen is empty. There ought to be no suppression on this cycle with
the low dose of Ostarine, so you’re unlikely to want any PCT.
As Soon As you’ve reached the level of hardcore, you probably feel able to strive just about anything!
No matter how hardcore you would possibly be, there ought to still be limits on how and
what you stack in a SARM cycle, like there would be in a
hardcore steroid cycle. Being a primary cycle, you’ll find a way to expect glorious outcomes even with only one
SARM at a low dose on a short cycle.
Ron has built a quantity of profitable carriers since retiring from bodybuilding.
He is a quantity one life and fitness coach, an skilled in physiology, diet and nutrition, and fats loss, and
a pastor of a non-denominational Christian church in Salt
Lake City, Utah. In conclusion, it’s clear
that there are natural alternatives to steroids
that may assist you to obtain your targets of bulking up whereas avoiding the severe and harmful unwanted aspect effects of anabolic
steroids. While more research must be done on nitric oxide before it may
possibly actually replace steroids, preliminary findings
counsel potential benefits when it comes to pure muscle building and recovery.
As anabolic steroids are unlawful and can’t be prescribed for cosmetic purposes, bodybuilders’ only possibility
is to buy them on the black market. As with all anabolic
steroids, testosterone will decrease endogenous testosterone levels.
Testosterone will improve blood pressure as a end result of a redistribution of HDL and LDL
levels of cholesterol. However, we discover such
ldl cholesterol fluctuations are mild compared to other anabolic steroids.
In women, anabolic steroids could trigger the looks of masculine
features, similar to elevated physique hair,
a deepened voice, and decreased breast measurement. In males, they’ll induce the shrinking of testicles and provoke breast development.
Many authorized steroid customers stack products (e.g., a bulking and testosterone booster combo)
for enhanced results. Look for pre-formulated stacks from trusted brands to
keep away from ingredient overlap or excess dosages. As you can see, all of
these dietary supplements are authorized alternatives to well-liked bodybuilding steroids.
D.bal.max helps you get massive muscle tissue by rising the protein synthesis,
your energy, and testosterone. The mixture of natural
elements will enhance testosterone ranges
in your bloodstream. You’ll see how these supplements can help you construct body you all
the time wished and why is D-Bal the most effective
pure different to bodybuilding steroids. Nonetheless,
after speaking with my gym buddies that have taken steroids,
they say you improve muscle progress about 15% quicker compared to naturally.
Cardarine won’t shut down your testosterone, however
Andarine may be suppressive, so it’s important to have a PCT plan ready for the
end of this cycle. Ideally, a PCT cycle of a minimal of
two weeks is needed; in rarer instances, you may need as a lot as 4
to 6 weeks. Nolvadex is the best SERM for a SARM PCT, and 20mg day by day might be sufficient
generally. There’s no reason why you can’t lose 4 or 5 kilos of fat (not muscle) within your first week on this stack.
Even with little change to a good food regimen, that is more than potential except you’re extremely lean.
With RAD-140’s highly suppressive results, it is a stack that WILL require PCT for the overwhelming majority of users.
Both of those steroids are fast-acting, causing visible adjustments to
body composition, particularly in regard to body fat, in the
first few days of supplementation. We have found this to
be probably the most efficacious oral cycle for getting ripped.
Proviron will improve Winstrol’s anabolic results whereas rising androgenicity
additional, aiding fat loss. However, it is likely to trigger average testosterone suppression (8) and elevated ldl cholesterol.
Proviron, due to it being an oral illegal steroid pills – http://www.trimartolod.Fr – and failing
to transform into estrogen, leads to vital will
increase in whole ldl cholesterol (with HDL levels reducing and LDL
ranges spiking).
The key here is to maintain up a low dose of simply 10mg day by day of Testolone for the
whole 8-week cycle since important muscle features aren’t your precedence on a chopping cycle.
But you’ll see some wonderful strength positive aspects at 10mg and even some
lean muscle. With a calorie-deficit food plan, fats might be simpler to lose, and you’ll
maintain existing muscle. LGD-4033 will let you placed on spectacular measurement
and see a notable enchancment in muscle power, so you’ll be
succesful of carry heavier and enhance the depth and length of your exercises.
It was first used by Bulgarian weightlifters, who experienced increased muscle size and power from utilizing a product
of tribulus terrestris known as Tribestan (9).
My strength typically goes through the roof, and my muscle tissue blow
up dramatically. I truly have gained 10–15 kilos of muscle in just 4 weeks, solely from using a check booster, which
is analogous to what you’d gain on anabolic steroids. Testosterone boosters, in my expertise, are essentially the most
highly effective natural bodybuilding dietary supplements in the marketplace.
Not solely does this compound assist customers put on considerable quantities of
lean muscles, nevertheless it also aids the effective burning of fats reserves situated
underneath your skin (subcutaneous fat). And remember that first-time customers
could acquire wherever between 15 and 20 pounds throughout this cycle.
For instance, Trenbolone-based steroids are used
to construct muscle and improve muscular power, whereas Clenbuterol-based steroids help shed
excess fats. You may also combine two or more appropriate steroids to
experience a extensive range of benefits, provided they don’t render any opposed
side effects in your body.
This disruption can manifest as modifications within the regularity or length
of durations. In most circumstances, the menstrual cycle should
normalize after discontinuing Anavar utilization; nevertheless,
it’s important to remain attentive to any irregularities and handle them accordingly.
However, these problems can typically be solved by taking some time off and permitting your body to recuperate.
You mustn’t push yourself past the restrict of your recovery talents by persevering with with too much heavy coaching or high-resistance train if you’re recovering
from an over-training period. Age, coaching,
diet, and steroid experience are just a couple of features that ought to all the time be evaluated earlier
than starting a brand new cycle.
In order to search out the essential that means of the phenomenon, the analysis work have to be carried
out with a reflective and bridling angle in accordance with the RLR method (Dahlberg et al.,
2008). In Accordance to Brinkmann and Kvale (2014), the info should be divided, organized, and simplified to get a transparent image.
The analysis started with listening and reading the interviews in their entirety with an open mind to facilitate an preliminary understanding.
General, Anavar has turn into an integral part of bodybuilding,
serving to individuals not only to reshape their bodies but in addition to improve
their total training effectiveness. “Women, particularly as they age, wrestle to extend or preserve muscle mass,” says Gray.
Contemplating that power has been implicated in longevity, the significance of muscle isn’t one thing to gloss over.
Creatine can assist wholesome muscle energy and
mass, which in flip supports women’s capability to stay active and impartial,
and thus overall quality of life and long-term health.
However, users may retain the majority of their
results from an Anavar cycle in the occasion that they continue lifting weights and weight-reduction plan diligently.
One benefit of Anavar supplementation that isn’t apparent when taking a look
at earlier than and after pictures is the increase in power.
If your damage becomes extreme or lasts for an extended interval, then you must search medical recommendation from
your PT or doctor. As well as preserving a nutritious diet and being physically active, additionally it is necessary to take care of your emotional state.
Whereas you might not have the flexibility to change the weather or your job, you can make modifications to the way you take care
of tense conditions and take care of stress within the type of anger or frustration.
Some of the best slicing steroids for weight reduction are shared in the
above part. It is equally helpful for both women and men to maintain up muscle tissue with greater fat loss.
Although, feminine Winstrol steroid is primarily not a bulking steroid, but nonetheless it boosts the nitrogen retention and improves protein synthesis with the
rise of blood cell count. Nevertheless, steroids are not just limited to achieve the bulk, and
can play versatile role within the fitness journey.
If you are looking to get shredded physique, and need to minimize down extra
fats from the physique, the steroids might help you in this as nicely.
Dr. Thomas O’Connor has also noticed a number of
patients developing cirrhosis of the liver from long-term Anadrol
use. Anadrol is amongst the most hepatotoxic steroids in our
testing, inflicting notable rises in ALT and AST enzymes (markers of liver stress).
We find high dosages of any oral steroid trigger notable fluctuations in HDL and LDL ldl cholesterol by way of the stimulation of hepatic lipase, an enzyme that
has a detrimental impact on ldl cholesterol.
This lack of information is regarding, with it resulting in women (unknowingly) taking megadoses of
harmful compounds.
If you want to enhance your strength and become stronger, then a one rep max calculator What Is Steroid the
proper software for you. A one repetition max calculator helps you establish your
true max reps earlier than even starting your
exercise routine. It will assist boost up your performance and prevent injuries while doing so!
A one repetition max calculator can also be a good way to
trace your progress and see how a lot weight you have lifted overtime.
Facet results are a transparent signal that your physique is beneath pointless strain which instant consideration is required to prevent hurt.
James struggled along with his weight his complete life, however his need to get in form
ignited when he began to wrestle with symptoms like fatigue, low libido, and insomnia.
“This picture is after being off prednisone lengthy enough to lose all the water weight. I’m pointing to a stretch mark on my face caused by excessive doses of prednisone.” — Marisa S.
Welzo acts as a healthcare platform, connecting sufferers with one of the best healthcare providers to allow
a seamless experience. Moreover, getting sufficient rest and
taking other drugs you might have been prescribed is important.
The modifications would possibly range between people, but the cumulative effects are
likely constructive, enhancing both athletic performance and bodily aesthetics.
Remember, these advantages are carefully tied with accountable Anavar utilization and
commitment to rigorous coaching and proper vitamin. One of the necessary thing reasons for Anavar’s reputation is its effectiveness in promoting
lean muscle development. By increasing nitrogen retention and supporting protein synthesis, it aids
in the development of quality muscle mass. This permits customers to achieve a extra sculpted and toned physique whereas minimizing the
chance of extreme water retention or bloating.
In addition to the bodily features, Anavar doesn’t induce virilization – a course of the place girls develop male traits –
to the identical extent as other anabolic steroids.
This distinctive blend of elements comes with
the inclusion of samento internal bark which has long
been used to deal with arthritis and different inflammation primarily based signs.
Better often known as cats claw – this complement is
perfect for decreasing the irritation and fighting off injury from rigorous coaching periods.
Steroid options with no health dangers may be a better answer and should definitely be thought-about.
Arnold Schwarzenegger is probably the most famous bodybuilder to ever admit to steroid use.
Anavar (oxandrolone) is an anabolic steroid used by each women and men to simultaneously build muscle
and burn fats (1). Testo-Max is the proper steroid alternative for anybody looking to increase muscle mass without the
increased estrogen production or unfavorable side-effects of conventional steroids.
Trenorol comes with a novel blend of beta-sitosterol, nettle leaf and
pepsin. Though these products are comparatively new to the world
of bodybuilding there are top-of-the-line formulation for reducing levels of cholesterol – important for wholesome muscle growth.
Anadrol helps to create more red blood cells, which can lead to an increased oxygen carrying capacity.
For this purpose anadrol is mainly used for growing working sets to longer length, but has also been shown to be fairly efficient for weight
achieve.
Anavar and testosterone are among the least harmful anabolic steroids with regard
to ldl cholesterol. In our experience, the cardiovascular pressure of Anavar is marginally larger than that of testosterone.
This could be attributed to Anavar being an oral drug, therefore inhibiting estrogen conversion and subsequently activating hepatic lipase.
Healthcare providers mainly prescribe anabolic steroids to deal
with low testosterone (male hypogonadism). But they use it for other situations as properly, corresponding
to to stimulate muscle progress for folks with certain cancers or acquired immunodeficiency syndrome (AIDS).
Anavar can be stacked with different anabolic steroids for enhanced fat loss.
Oral Primobolan isn’t one of the easiest anabolic steroids to search out.
The technical term for these compounds is “anabolic-androgenic What do steroids do to women’s bodies” (AAS). “Anabolic” refers to tissue building (mainly muscle), and “androgenic” refers to a group of sex hormones referred to as androgens. Frequent Trenbolone prices in on-line stores can vary significantly based mostly on a number of elements. Firstly, the brand and reputation of the product play a vital position in figuring out its price. Well-known and established brands which have a track record of delivering high-quality and potent Trenbolone usually come with the next price tag. Moreover, the demand-supply dynamics play a big function in shaping Tren’s value vary.
They additionally are inclined to clear the system quickly, hence are sometimes required to be taken multiple occasions a day to maintain up secure blood levels. In the Uk, anabolic steroids are categorised as Class C controlled substances under the Misuse of Drugs Act 1971. It’s legal to own anabolic steroids for private use, but it’s unlawful to produce them. This means you may be prosecuted for possession with intent to produce if you have large portions of those substances with no prescription. Even giving them away to friends can outcome in as much as 14 years in jail, a limiteless nice, or each. Trenbolone is a dry steroid that doesn’t aromatize or convert to estrogen; thus, the risk of water retention is eradicated.
Prison sentences and fines may be doubled if it is a second offense. In 1958, Ziegler, with the help of CIBA (a Swiss pharmaceutical firm), launched Dianabol in the US after efficiently filing a patent for their new drug. Equally, using Anavar all yr spherical on a decrease dose in comparison with administering the next dose in the short time period, the particular person is much less likely to discover outcomes. However, a better dose in a short six-week cycle might be more evident. Valerian (Valeriana officinalis) is an FDA-approved herb, nicknamed nature’s Valium (39). It can be bought in local well being stores worldwide with no prescription. Due to its sedative and GABA-boosting properties, it may additionally be used to cut back anxiousness and despair (40).
Bodybuilders use bulking cycles to attain significant will increase in muscle hypertrophy. Testosterone is androgenic in nature; thus, we generally observe irritation of the prostate, zits vulgaris, and male sample baldness in patients. Due to its high market value, bodybuilders could be much less likely to make use of oral testosterone, also recognized as undecanoate or Andriol.
Some folks also may like how their muscle tissue look after they take these medicine. Anabolic steroids usage can lead to the event of male breast tissue, a situation generally identified as gynecomastia. This occurs as a outcome of some anabolic steroids could be converted into estradiol, a type of estrogen, by the enzyme aromatase. Elevated ranges of estrogen can stimulate the growth of breast tissue. DHT is answerable for the event of physique hair, prostate, penis measurement (during puberty), and libido. Though other anabolic steroids are more likely to trigger androgenetic alopecia, which is the shrinking of hair follicles, inflicting vital thinning and hair loss (on the scalp).
At our clinic, we specialise in focused therapies for varied elements of the physique, every with its personal pricing construction to ensure affordability and worth for you. “He positively
will not be as massive, as there isn’t any method to keep that measurement without steroids,” says Krissy. “Cycling” refers to when steroids are used periodically with breaks in between. “Stacking” refers to when you take various sorts of steroids together to maximise advantages. The Iron and Whole Iron Binding Capacity (TIBC) Take A Look At measures the amount of iron in your blood.
This would rely on your present food plan, your objectives, and the anabolic steroids taken. In our experience, bulking steroid cycles are complemented by a small calorie surplus food plan. Equally, we now have found that a small calorie deficit is perfect for max fats loss and muscle retention, which complements chopping steroid cycles.
This steroid stacks well with powerful injectable
steroids, and in small doses (up to 30 mg per day)
is suitable even for beginners who wouldn’t
have expertise in using anabolic agents. Oral steroids have occupied an honorable position in sports pharmacology for a really lengthy time since most bodybuilders and sportspeople
have begun taking this form of sports pharmacology. This is not surprising, given the ease of use and
the reality that they don’t require any particular intake prerequisites.
Oral steroids, like injectable steroids, have their professionals and cons.
Below, we will quickly go over what to anticipate from an oral cycle and the
means to get probably the most out of it. In our online shop, you
can find anabolic steroids and oral steroids from respected
pharmaceutical producers who have been engaged in sports pharmacology research for
fairly a long time. Long-term use can cause the body to produce too many
red blood cells and abnormal ranges of fats (lipids) within the blood.
Is it attainable to realize vital outcomes with out the use of additional
sports drugs? These medicine contribute to the event of these qualities and parameters that the athlete wants.
To be capable of start training at heightened levels, rigorously study and
comply with the instructions when shopping for
your anabolic course at our on-line sports activities supplements retailer.
The synthesis of the protein is accelerated, which leads to muscle
growth. Hence, recovery takes much less time than coaching, and the outcomes from the hundreds might be seen faster.
The impact of catabolic hormones, specifically cortisol, is leveled.
There is a splitting of fat cells as a result of acceleration of
cellular metabolism.
Tren Hex is nice for bulking, strength, and lean mass features but
can be highly effective for chopping and fat loss. It
doesn’t aromatize into estrogen, so there is not a bloating
or water retention, and it may possibly deliver a hard,
vascular physique with the right diet. Potential unwanted effects embody low libido and erectile dysfunction if not
used with testosterone, high ldl cholesterol, zits, head hair loss, gynecomastia, and insomnia.
Welcome to our on-line store of genuine anabolic steroids for sale!
We offer a broad range of high-quality products at reasonable costs.
When shopping for anabolic steroids from our retailer,
you may be sure of their high quality.
This is a stable slicing dose that may guarantee
no lack of muscle while dieting. Smashing through
personal records is a given when using Trenbolone
for bulking. Tren will also assist maintain glorious strength levels if you’re weight-reduction plan on a chopping cycle, the place you’d otherwise see a loss in energy while consuming a calorie deficit.
Your tolerance levels will decide the best type of Steroids – musicland.hu – dosage for
your wants, as will the inclusion of different compounds in your cycle.
This simultaneous impact makes it a major contest preparation compound, particularly as it’s a steroid that doesn’t aromatize,
so you won’t be coping with fluid retention. Tren is
a steroid selling hardness and a shredded physique that’s dry, lean, and vascular.
Muscle features can vary substantially on a Tren cycle,
together with your outcomes being totally different from the next guy because
of the variables concerned. Food Plan, coaching, cycle length, dosage, different compounds used, and
your body type and metabolism will all issue into your outcomes.
This brand gains reward from customers across the globe for its large
vary of oral and injectable steroids, essential PCT merchandise, in addition to a variety of SARMs and Peptides.
Maxtreme Pharma is a trusted model for performance-enhancing drugs,
acknowledged for its wide selection of inexpensive merchandise
tried and examined to supply outcomes every time.
They make an infinite collection of oral and injectable steroids, complemented
by PCT products to ensure a well-rounded cycle.
At Bio Genetics USA, we recognize your dedication to reaching peak health levels
and optimal performance.
They are continuously seeking premium steroids at the
lowest possible value. This is when it turns into important to contact us (SteroidsLimited) in order to
acquire the purest steroids. In conclusion, buying Dianabol within the USA necessitates a keen understanding
of its legal status and the dangers of unregulated purchases.
Anabolic Steroids are used for a few of different well being problems like Hypogonadism,lated maturity,
some weaknesses and post threapy for HIV infection and a few of
different infections. Some scientists based that Anabolic Steroids could help to increase skeleton muscles
on lab animals. After that bodybuilders and weight lifters abuse anabolic steroids than some
of other sport’s athletes keep utilizing them.
Individuals discover anabolic steroids from their gym,competitions or order
them on-line.
Rick is passionate within the defense of his clients, and works diligently as lead
counsel, co-counsel, or as a steroid, bodybuilding drug or PED marketing consultant with lawyers throughout America and even internationally.
The content material herein is provided for informational
functions and doesn’t exchange the necessity to apply professional medical judgement when diagnosing or
treating any medical situation. A licensed medical practitioner should be
consulted for analysis and remedy of any and all medical situations.
They have in frequent the removing of a C19 methyl group
from the androgen structure; this accentuates the
impact of accelerating muscle bulk on the expense of virilization.
This addition was noted to inhibit the hepatic degradation of
the molecule, tremendously extending the molecule’s half-life and making it active when administered orally.
Prior to this, testosterone, dihydrotestosterone, and 19-nortestosterone all required
parenteral administration because of hepatic metabolism of 17-ketosteroids;
this metabolism occurred on the first cross, when the medication have been administered orally.
Trenbolone is no doubt some of the useful anabolic steroids available on the market.
When we contemplate the therapeutic benefits of Nandrolone, or even Testosterone, it may
not quite match up however on the premise of uncooked energy
and physique transformation Trenbolone Acetate is the king.
No steroid shall be as beneficial when chopping, not even close, and when bulking it’s nothing wanting fantastic.
Over the years, and this is more than obvious on steroid message
boards, an concept has been passed alongside that the side effects of Trenbolone
Acetate are assured. In reality, some actually consider that in the event that they
dont happen it should be due to a poor product. Not
only is this a ridiculous way of thinking, it really doesnt make any
sense. Trenbolone, whereas tremendously powerful, just isn’t some
strange steroid from the fifth dimension. Keep In Mind,
its simply an altered type of Nandrolone, which itself is just an altered form of the first male androgen testosterone.
This occurs although there are unpleasant and generally extreme side-effects taking place.
Withdrawal should be monitored by medical professionals to assist
eliminate side-effects or cut back their influence [10].
Topical steroids become absorbed into the bloodstream and affect other methods of the physique, such because the eyes, endocrine, immune,
skeletal, and gastrointestinal techniques, in addition to the integumentary system.
Steroids mimic pure hormones produced within the body,
together with glucocorticoids (such as cortisol) and mineralocorticoids (such
as aldosterone).
The 3-keto stability added by the 2-hydroxymethylene group greatly enhances the drug’s Anabolic
Steroid Treatment, Oldweirdherald.Com, properties.
The action of this agent in androgen-sensitive tissues
is very like that of DHT and is sort of androgenic. Fluoxymesterone is a
potent androgen that is produced beneath the brand name Halotestin.
Beneath are some additional assets to search out out more about steroids, IPEDs, and information on the
means to report doping. Influencers who appear
on these websites may be highly effective in affecting behaviour or private moral; many
reveal the perceived advantages of IPED or complement use, with out articulating the numerous dangers, and are financially incentivised to
take action. Latest research suggests that “fitspiration” images, photographs of
influencers collaborating in exercise or exhibiting off their our bodies, can lead to decrease self-compassion. Usually, men and women will have totally different motivations for using IPEDs, mirrored in their respective choice of substances; Methandrostenolone being most popular amongst males, and Oxandrolone
in ladies. All steroids are associated to a characteristic molecular structure composed of 17 carbon atoms—arranged in four rings conventionally denoted by the letters
A, B, C, and D—bonded to 28 hydrogen atoms.
If you or someone else needs pressing assist after taking drugs or ingesting, name 999 for
an ambulance. This is a Class C drug, which can solely be bought by pharmacists
with a prescription.
Even although evidence suggests possible increased lean mass with AAS abuse,57–61,63–65 extra
muscle does not always equal improved efficiency. In some endeavors,
similar to marathons and triathlons, elevated mass (lean or otherwise) may
result in a efficiency decrease. Contemplating the identified association between muscle mass and drive
improvement, a relationship between AAS abusers
and strength or power activities, though not essentially causal,
is not unexpected. A 2004 double-blind, randomized study57
of 16 skilled bodybuilders concerned weekly injections of nandrolone
decanoate or a placebo (200 mg) for 8 weeks.
Among 12th graders surveyed in 2000, 2.5% reported utilizing steroids a minimum of as soon as
of their lives, while in 2004 the quantity was 3.4% (9).
A latest web research also concluded that anabolic steroid use among weightlifters and bodybuilders continues (12), and by all accounts, there are no signs
of it stopping in athletics any time quickly. A “Managed substance” is one that is more firmly regulated than uncontrolled
prescribed drugs. They enhance the building of cell proteins, which leads to
the build up of mobile tissue, especially in muscles. Anabolic steroids also
have properties that include the development and upkeep of masculine traits corresponding to the growth of the vocal cords and body hair
[4].
An excessively high dosage can lead to a lack of consciousness, respiratory issues,
overdose and even demise. Barbiturates are extremely
addictive which is why they are rarely prescribed at present and have largely been changed by
benzodiazepines. Barbiturates are a sort of depressant that were
used primarily in the 1960s and 1970s for anxiousness, insomnia, epilepsy, and as an anesthetic.
Based Mostly on private experience, B-AET presents
superior outcomes compared to 7-KETO DHEA. While there
are ways to find and confirm the quality of AAS on-line,
it’s important to strategy this with warning, awareness of
the authorized landscape, and a give consideration to
well being and safety. General, your joint health whereas on AAS must be a first
priority so your training is not hindered.
It Is necessary to be aware that continual use of AAS can lead to long-term
joint points. Regular check-ups with a healthcare supplier,
together with monitoring of joint health, are essential for these utilizing AAS over
prolonged intervals. Recognizing the indicators of joint problems early and taking proactive measures
might help mitigate the danger of long-term damage.
Participating in physical therapy or particular joint mobility exercises can improve joint operate and reduce stiffness.
The areas of Ukraine occupied by Russia face forced erasure of local memory.
Apart from torturing and killing the locals, Russians
additionally destroy Ukrainian books and rename our streets, districts,
and full cities to worship Russian and Soviet imperial symbols.
As a society, we had time to understand ourselves better and
revisit the stories we had been told about ourselves. Kyiv grew sufficient muscle to
get rid of faceless Soviet symbols and empower local heroes like Valeriy Lobanovsky.
My street had its name changed to something significant as a
outcome of Ukraine enjoyed three many years of independence from the totalitarian,
imperialist rule of Moscow. This can also be a narrative of defending people’s memory in opposition to a
violent drive that wishes to erase it. So that once we do eventually forget, our streets
will be there to remind us.
It’s the same as being in prison, where you go see a physician that gives you some medication, however when those drugs work,
they’ve your whole life changed. I’m not a man who desires to have sex, I discover the act to be uncomfortable,
and I even have a very massive prostate. I’ve by no means had a associate that’s had a vasectomy, however
I’ve had companions with tubal ligation. Signs in adults usually become more extreme with
age, anabolic steroid definition science.
“The Knicks embody the spirit of Ny — resilient, passionate and unstoppable,” Mayor Adams mentioned in a information release.
These include being jittery, shaking arms, feeling wired, and insomnia.
This is the method referred to as protein synthesis,
top bulking supplements 2022. More recently the Uk Brazilian Jiu-Jitsu Affiliation (UKBJJA)
has also decided to introduce testing to their events.
IS PED USAGE ETHICAL/MORAL IN SPORTS, bayer testosterone enanthate
pretend. Many people select to go this route anyway, and while many are glad with their purchases, others simply
don’t get the results they anticipated as a outcome of the steroid products turned out
to be counterfeit.
Sometimes avenue names are in reference to the drug’s purity in some way,
but normally the road names simply discuss with the high
in anabolic steroids that’s produced by the drug’s use, anabolic steroids road names.
Avenue names are in no way standardized from
one steroid to a different, and a listing of generally used names may be found below.
Doctors prescribe anabolic steroids to assist with skeletal muscle
and the development of male sexual traits. Round 3
to four million people in the united states, nonetheless, use anabolic
steroids and not using a prescription for nonmedical purposes,
including as appearance- and performance-enhancing drugs (APEDs).
If you’re taking anabolic steroids outside of a doctor’s care, you would possibly have serious unwanted side effects that can have a negative influence in your well being.
Talk to your physician about possible remedy plans if you’re apprehensive about misusing steroids.
This time period is a colloquialism for anabolic
steroids, which are anabolic steroids safe (https://wikis.ece.iastate.edu) artificial substances that mimic the effects
of testosterone in the physique.
By increasing the anabolic state of your body, it
is feasible for you to to realize mass and strength at a much faster fee.
The cause why most of us use these kind of dietary supplements is
to boost our progress safely since they don’t have any
side effects. I’ve used these dietary supplements and quickly started feeling the effects.
After about two weeks of utilizing them, I could tell these
products were one of a form.
It has also been linked to cardiovascular disease and blood pressure problems, especially in youthful males.
It was additionally just lately linked to mind harm and dying by drowning, probably in accidents with the anabolic steroids utilized in some of the world’s greatest bodybuilders, sarm quebec.
It is commonly listed as an aldosterone stimulant or an aldosterone analog.
A generally used type of Dianabol in bodybuilding is Testosterone Cypionate.
If you inject anabolic steroids and share a needle with others, you’re at
nice threat of getting HIV, hepatitis B, and
hepatitis C. Initially found in the late 1800s, amphetamines weren’t used medically until the
Thirties after they have been prescribed as decongestants.
Later, they have been used to deal with other circumstances, corresponding to weight problems
and narcolepsy. Nonetheless, throughout World War II, they were used by soldiers for his or
her performance-enhancing and stimulant results. This created to a full era of addicts, and
by the Seventies, they were listed as controlled substances.
This time period refers to individuals who often use steroids to boost their bodily performance or look.
“Juiceheads” is a colloquial term that usually carries a adverse
connotation, implying that the individual’s muscular physique is the outcomes of steroid use somewhat than natural development.
Ethanol Ethanol (Etolol) is an industrial-grade drug that has gained wide approval for
human consumption, anabolic steroids our bodies.
It is usually used as an ingredient in alcohol to dilute the style
of alcohol, and to provide the alcoholic drink a extra nice taste.
In the case of a drug called Klean Kase [5],
the place you will get the chemical known as “spice,” the word tire can additionally be generally utilized by
some users for this reason, steroids anabolic examples.
Violent crimes, homicides and suicides have been attributed to PCP.
An anti-anxiety treatment just like Valium, Xanax causes drowsiness.
The drug is particularly harmful when mixed with different substances.
Marijuana was outlawed in the 1930s as a end result of “reefer madness”
hysteria promoted by the previous Prohibition czar.
One medical condition that may cause a change in penis measurement during TRT is Peyronie’s disease.
Peyronie’s illness is a situation in which the penis curves or
turns into bent throughout an erection because of the formation of scar tissue.
TRT could worsen this situation, leading to additional
adjustments in penis dimension and shape. If you’re involved
about undesirable growth or have physique picture
concerns, speaking with a healthcare provider or psychological health professional is
recommended somewhat than attempting self-medication. Anabolic steroids,
notably testosterone and its artificial derivatives, have a extra complicated relationship with penile size and function. For instance, some individuals reported
cravings for the drug, despair, insomnia, fatigue, loss of intercourse drive, and loss of urge for food, to name a few.
Unfortunately, when you understand that cheap steroids for bodybuilding are negatively impacting your health and intercourse life after which stop taking them, it will take a while for the body to return to
normal.
Nevertheless, sexual exercise did not change, and satisfaction was truly improved.
Given that 93% of the patients in that research
underwent surgery for pathology, circumcision might have
alleviated enough sexual apprehension to permit unmasking
of beforehand unidentified erectile dysfunction. Though many investigators feel that circumcision reduces penile sensitivity, a rise in ejaculatory latency time could, in some cases, be
thought of an advantage. Anavar, identified generically as
oxandrolone, is a synthetic anabolic steroid usually used for muscle growth and weight achieve.
Whereas it’s popular amongst athletes and bodybuilders for its capability to
boost physical efficiency and appearance, there are concerns about its side
effects, significantly relating to sexual well being.
One such concern is the potential link between Anavar use and erectile dysfunction (ED).
In this text, we’ll explore the relationship between Anavar and
erectile dysfunction, shedding mild on this essential concern for men contemplating or at present utilizing Anavar.
With a flagship clinic in King’s Cross and additional locations in North London and Essex, the
Institute is at the forefront of laser science innovation. The info supplied on edpillsforever.com is intended for educational purposes only.
Our web site supplies information on an ‘Available foundation.’ Do read the product description earlier than shopping for any medicine from our web site.
We sell products from respected, unique and reliable vendors and pharmaceutical
manufacturers. We don’t suggest that any recommendation, whether or not written or verbal, provided by our staff, agents,
retailers, or anyone else linked to us, constitutes a warranty.
These results are typically temporary and often resolve after discontinuation of the medicine under medical supervision. Additionally, mania,
hypomania, and main melancholy have been linked with steroid users.
A 58-year-old uncircumcised male was referred for
LS of the glans penis to a male genital dermatology clinic.
The patient’s signs first occurred 36 years previous to evaluate.
At this time, the patient was 22 years of age describing
severe dysesthesia of the glans penis and concurrent swelling of distal foreskin. The
pain and dysesthesia severely disrupted the patient’s quality of life,
limiting capacity to work and limiting sexual intercourse leaving the patient
depressed. Infectious causes similar to herpes and sexually transmitted infections
were ruled out by swab testing and clinical correlation.
After 8 years, the patient was recognized with penile LS with histological
confirmation on pores and skin biopsy by a dermatologist.
The measurement of the penis is a subject that has long been surrounded by curiosity and speculation. Many elements
contribute to the scale of a man’s penis, together with
genetics, hormones, and general well being. While testosterone
does play a job in penis progress during puberty, it’s not the solely real figuring out issue.
In fact, many of the claims surrounding testosterone and penis
size are primarily based on marketing and commercials
for merchandise claiming to increase penis size.
Avascular necrosis, a horrible prednisone facet effect
causing bone death in the hip, can happen to anybody,
younger or old, male or feminine. So if you’re ever having hip ache that wasn’t there earlier than, make certain you discuss to your physician about it.
Women notice that they start getting facial hair that
they never had before.
For the identical cause your penis shrinks with age — lowered testosterone
— your testicles also get smaller. Harm, much less blood flow,
and anabolic steroid (synthetic testosterone) use can also be liable for the scale discount.
A smaller testicle can typically be a symptom of testicular most cancers, too.
Misuse of these substances can result in severe well being penalties and long-term
issues. Medical supervision is important to ensure secure and appropriate use.
Anabolic steroids have a number of legitimate
medical applications. One of the first uses is hormone replacement
therapy (HRT) for people with hormonal imbalances. Anabolic steroids are prescription medicines
which may be used for his or her muscle-boosting effects.
Trenbolone’s unwanted effects could be like no different AAS in their severity and
can be unpredictable. I agree when guys say that Tren’s status for out-of-control unwanted effects is commonly exaggerated.
Ongoing testosterone cruising or TRT is strongly beneficial to support testicular
function from the long-lasting suppression caused by Trenbolone.
Male pattern baldness and acne-type skin circumstances are certainly two potential unwanted effects of anabolic steroid use.
Of the 2, pimples is taken into account the extra common side effect, with baldness being at larger danger if
your male ancestors handed on baldness genes. Plenty of protein is a should while on a cycle since steroids increase protein synthesis, which in flip is what builds muscle.
You want to keep your gasoline and by no means allow the muscles
to turn into depleted. When it involves one of the
best location in your steroid injections – as
a newbie, it’s often recommended to start at one of the largest muscles
– the buttock space. The top proper or left
space is the gluteus maximus muscle and would be the least painful location.
NPP is superb for a slicing cycle because it comes with little water retention, with
the bonus of offering joint assist. Assume of anabolic steroids in sport (Renate) steroids,
and the name Dianabol (Dbol) is usually the first
to come back to your thoughts. It’s long been the
most popular and revered steroid, and for good
purpose. Trenbolone has by no means been accredited for human consumption because
of its poisonous nature, and subsequently, users are risking their short- and long-term well being when taking this compound.
In our expertise, combining trenbolone with other anabolic steroids in a stack has resulted in additional health deterioration. Trenbolone is unique
within the sense that it’s a dry compound, contrary
to different bulking steroids, which are sometimes moist.
This characteristic signifies that trenbolone doesn’t convert to estrogen, so users do not experience water retention or
fat accumulation during a cycle.
However as the cycle advances, count on to see a extra noticeable reduction in physique fat, heightened muscle growth, elevated power, and improved stamina.
In The Path Of the conclusion of the cycle, important changes in body composition, including enhanced
muscle definition and an total improved physique,
could become apparent. Anavar, also identified as Oxandrolone, draws those seeking to sculpt their physique without significant weight gain. In this text, we’ll dig into
authentic Anavar outcomes and the nuances of its effects.
To maximize Anavar’s potential for muscle positive
aspects and fats loss, it’s important to maintain a well-balanced food regimen and monitor calorie
intake. An perfect food regimen for these taking Anavar should consist of
high-quality protein, healthy fat, and sophisticated carbohydrates.
Post-cycle therapy (PCT) is essential for those who full an Anavar cycle, because it helps
to restore the body’s natural hormonal steadiness.
There’s also no purpose why a beginner would want to take Superdrol, as a testosterone cycle is a safer protocol
and able to producing exceptional muscle and power positive aspects.
We find that taking a full day’s dose in a
single sitting is prone to cause fewer positive aspects and harsher unwanted effects, as testosterone levels will turn out
to be less secure (with peaks and troughs). Anecdotally,
we’ve seen Superdrol add lbs of lean muscle via a cycle, as properly as improve power to document levels.
The use of steroids has been proven to increase lean physique mass, power, and power.
Steroids are commonly used by bodybuilders and athletes to enhance their
performance. The wrong NPP (Nandrolone Phenylpropionate) dosages can do
extra hurt than good, making it essential to observe dosage instructions and suggestions for a secure and effective cycle.
NPP is a potent anabolic steroid, and its dosage should be carefully tailored to
particular person experience levels, objectives, and tolerance.
Right Here, we’ll delve into the dosage suggestions and essential ideas to ensure a successful NPP cycle.
If you observe significant muscle achieve with none adverse results,
you would possibly resolve to increase the dose. On the flip
aspect, if your physique shows signs of discomfort or uncommon adjustments, a discount in dosage may be essential.
Users also get improved blood circulate to the muscles with more water retention, making the “pump” extra outlined than ever.
An unusually large or bloated abdomen in bodybuilders isn’t typically an indication of
anabolic steroid consumption.
Nonetheless, it’s essential to strategy NPP cycles with data, caution, and a dedication to correct post-cycle
practices, including Submit Cycle Therapy (PCT).
By understanding the dynamics before, throughout, and after
the cycle, people can harness the potential of NPP whereas prioritizing their health
and health goals. Tren is a real game-changer for bodybuilders, thanks to its exceptional results on muscle improvement, chopping phases, and total
performance. As an anabolic steroid, Trenbolone possesses potent
properties that drive important muscle progress.
It stimulates protein synthesis and nitrogen retention, resulting in accelerated
features in lean muscle mass. Bodybuilders who incorporate Trenbolone into
their training regimen often expertise speedy and substantial increases in muscle dimension and energy.
On the flip facet, Anavar’s strength lies in subtly fuelling energy and endurance—not necessarily leading
to bulkier muscles, however actually building a basis of persistent may and stamina.
Winstrol, or as it’s scientifically known, Stanozolol, is a widely used performance-enhancing drug.
Health lovers and athletes usually flip to this steroid for its exceptional benefits.
These who use this substance usually report elevated power, decreased
physique fat, and enhanced bodily performance. It’s essential to recollect,
though, that while the outcomes could additionally be
impressive, this substance ought to at all times be used responsibly and underneath skilled steering.
Anavar causes reductions in HDL ldl cholesterol,
potentially inflicting hypertension (high blood pressure) and growing the
risk of arteriosclerosis. Nevertheless, in our lipid profile testing, Anavar solely causes mild cardiovascular pressure compared
to other anabolic steroids.
Anadrol, a steroid, is broken down within the liver before entering the bloodstream.
Heavy sweating can be brought on by testosterone esters, which have the capability to stop sweat glands from secreting water.
The results of a testosterone cycle will show nice enchancment in Physique composition when compared to a
non-steroid consumer.
In that contest, her sister Nicola turned the primary lightweight to win the overall
title and pro card (Nicola retired with work out steroids (http://newslabx.csie.ntu.edu.tw:3000/floyi038244303/7811298/wiki/Ozmosi-NAV-003-Drug-Profile) competing
as a professional). Joanna won the British championship
in 1998, turning into the youngest woman on the planet ever to
win a pro card. We have had patients who took steroids and didn’t practice,
and they built muscle and burned fat regardless of
being sedentary. However, their results are notably less compared to
customers who mix steroids with weightlifting. Clenbuterol is occasionally incorrectly
known as a slicing steroid because of its anabolic results, a minimum
of in research.
In 1989, researchers found that 54% of competitive male bodybuilders in Kansas and Missouri were taking steroids frequently, with 10% of the feminine bodybuilders
additionally admitting to such. The bodybuilder in the before
and after photographs (above) looks larger, leaner, and extra defined following HGH
use. However, his gut has additionally grown in size, which is indicative of visceral fat acquire.
This is the fat that wraps across the organs and causes
a distended look to the midsection. Trenbolone’s huge androgenicity is why it causes fats loss, with androgen receptors stimulating lipolysis.
In our experience, women often construct
7–10 lbs of muscle on Anavar whereas notably reducing visceral and subcutaneous fat stores.
Beneath is a sample cycle generally utilized by
weightlifters to attain an identical before and after transformation because the one above.
We have recognized a quantity of patients as
hypogonadal who have cycled Dianabol. Consequently, they required post-cycle
therapy therapy to resurrect pure endogenous manufacturing.
Arnold Schwarzenegger, also identified as the Austrian Oak, is believed to have utilized
Dianabol, an oral steroid, to boost his efficiency
on the Mr. Olympia stage. Due to its high market worth, bodybuilders could be
less likely to make use of oral testosterone, also called
undecanoate or Andriol. Final Warrior was an admitted heavy user of steroids throughout his
wrestling profession, and a lot of followers imagine this led
to his dying in 2014 of a heart attack at age
54. In an interview from 2008, Warrior spoke concerning the
pros and cons of using steroids.
There’s a lot that goes behind the scenes with using
steroids for constructing muscle that folks do not realize.
This is where I started to get worried and not sure about using steroids for constructing muscle.
Power sensible, I think it was two and a half weeks, three weeks, I began noticing some
energy increases.
The above transformation is typical of the extent of change we observe in bodybuilders after taking trenbolone for the first time.
They experience enhanced fat loss, elevated muscle mass, more distinguished vascularity, and greater muscle definition.
DecaDuro is a beast mode activator for many who need monstrous strength, muscle mass, and pain-free training.It’s simply top-of-the-line legal steroids for muscle growth and recovery —
no injections, no prescriptions, and no worries.
As such, they can begin with 15 mg per day of the compound for the first three weeks and increase it to twenty mg per day for the subsequent three weeks.
The right use of Anavar can help women shed both cussed abdominal and
subcutaneous fats while enabling them to placed on 10 to 12 kilos of wholesome muscles.
Additionally, it might possibly help the development of the general
physique composition of customers for a defined, leaner, and
fuller-looking body.
The biotransformation method follows the rules of green-chemistry as it works in mild reaction circumstances and aqueous
solvents. Furthermore, this microorganism-based strategy permits to change starting molecules
exploiting several benefits over chemical synthesis,
such because the regio- and/or stereospecificity of the reactions.
Despite the exciting benefits, only a few biotransformation-based
approaches have been utilized within the pharmaceutical trade up
to now [20]. A recent study reported the manufacturing of two new steroid compounds (coded SCA
and SCB), not chemically synthesizable, by the biotransformation of cortisone [15].
This combination of testosterone and Deca Durabolin is the least toxic
bulking stack in our expertise. Intermediate users will commonly administer
this stack once their body comfortably tolerates testosterone-only cycles.
Trenbolone has a stimulating effect on the central nervous system, triggering thermogenesis
and aiding fat burning. Nonetheless, such stimulation can contribute
to opposed effects, including insomnia, nervousness,
restlessness, elevated sweating, and even paranoia in sensitive customers.
Nevertheless, it is equally efficient by way of its ability to construct muscle tissue.
This is because their our bodies have not beforehand skilled
such levels of anabolism or protein synthesis.
Consequently, a primary cycle ends in swift
and significant adjustments in body composition. However,
the initial cycle may also be probably the most
deleterious because of users not yet developing a tolerance to such poisonous compounds.
It Is additionally important to note that using Anadrol comes with risks, including the potential for critical unwanted effects such as
liver damage, hypertension, and coronary heart disease.
Before considering the usage of Anadrol or another anabolic
steroid, it is essential to consult with a healthcare professional and carefully weigh the dangers and advantages.
Muscle progress is considerably enhanced, permitting for extra fast
gains in measurement and energy. Physique fats typically melts away, revealing a extra vascular
and defined physique.
After working out seven days per week for over forty years, he was struggling to complete three
health club sessions a week. After three months of TRT, his energy
began to return, alongside along with his features on the gym.
In our experience, its ability to remodel a user’s physique is basically unmatched by its anabolic steroid
counterparts. Moreover, a small calorie deficit will maximize fats burning when cutting on trenbolone.
Generally, the half-life of steroids is extra for individuals who don’t work out regularly, are
aged, overweight, or have existing medical conditions.
Another thing to notice right here is that oral steroids have
shorter half-lives than the injectable ones.
We also discover that Winstrol causes masculinization in women; however, this facet impact may be avoided with
minimal dosages (no greater than 5 mg/day).
Moreover, Trenbolone has the flexibility to inhibit the production of cortisol, a hormone known for its catabolic effects on muscle
tissue and its function in selling fat storage. By suppressing cortisol ranges, Trenbolone creates an setting that’s
extra conducive to fat loss and muscle preservation.
Furthermore, Trenbolone promotes nitrogen retention within the muscle tissue.
But as his weight loss slowed down, he wanted to push previous a
plateau to fulfill his health goals. After beginning TRT, Scott dropped 60 kilos, vanquished his fatigue, and is reinvigorated at
work. Ten years later, he weighed 285 pounds and relied on two power drinks
just to begin his day.
This is a drug program that helps regulate the hormone system
and velocity up the method of returning your body to normal levels.
It’s important to know that post cycle therapy
is a very needed a part of therapeutic and preventing the
chance of muscle mass loss and other adverse low side effect
steroids [https://sd2c-git.cores.utah.edu/patriciamacdev/fastest-muscle-gain-supplement6939/wiki/Does-Anavar-Cause-Hair-Loss?-Unveiling-The-Truth-Behind-Steroid-Usage-And-Its-Effects-On-Your-Hair] effects.
The above transformation is typical of the extent of change we
observe in bodybuilders after taking trenbolone for
the first time. They experience enhanced fats loss, elevated
muscle mass, extra distinguished vascularity, and larger muscle definition. Due To This Fact,
there’s little potential for significant features in muscle hypertrophy and/or power by
the point a user’s physique is ready for trenbolone.
Regardless Of this, we have still seen trenbolone take
a first-time user’s physique to the following level, with
greater muscle mass and lowered subcutaneous physique
fat. This potent anabolic steroid has gained recognition for its remarkable ability to promote fat burning and help in reaching a leaner physique.
Dr. O’Connor has over 20 years of expertise treating men and women with a history of anabolic steroid, SARM, and
PED use. He has been a board-certified MD since 2005 and provides guidance on hurt reduction methodologies.
Nonetheless, some steroids are FDA-approved in drugs, so medical doctors can prescribe sure compounds (like testosterone) throughout the confines
of the law.
That’s why they mix their steroid consumption with the best workout and food plan regimes to receive optimum
advantages. If you’re all about that bodybuilding life, whether it’s
your career or just for kicks, odds are you’ve
toyed with the concept of steroids. Weight
scales could not fluctuate much as a end result of simultaneous fat-burning
and mass-building effects from Anavar. Nonetheless, a woman’s physique composition will considerably
enhance, with a leaner, fuller, and extra defined appearance.
Nonetheless, the two guys have physiques which would possibly be at
completely totally different levels because one is
on steroids and the opposite is a life-time natural.
Trenbolone is derived from the father or mother hormone nandrolone and is
structurally modified to own stronger anabolic properties.
It displays a excessive anabolic ranking, that means it has a tremendous potential to stimulate
muscle protein synthesis and promote muscle hypertrophy.
Moreover, Trenbolone additionally has a robust affinity for the
androgen receptors, enhancing its capacity to
increase muscle strength and power. These attributes make Trenbolone
a most popular alternative for individuals aiming to take their physique to the subsequent level, surpassing the limitations of pure
muscle improvement. Nonetheless, it’s essential to notice that Trenbolone is a potent
steroid and must be used with caution, adhering
to correct dosage and cycling protocols to attenuate potential unwanted
aspect effects.
A particular person could choose to eat upkeep energy, notably if they are conscious of their body fat growing.
It replicates the muscle-building and strength-enhancing results of Dianabol,
however with out the undesirable unwanted facet effects.
Whereas PCT may help you stop the loss of muscle and other
negative unwanted side effects, it’s finest
to do it the best method. Depending on your needs and circumstances,
you might want to lengthen the size of this system. There are some side effects that are not reversible,
corresponding to coronary heart dysfunction and male pattern baldness.
Other reversible effects of steroid abuse are pimples,
oily hair, and cysts. You also can expertise mood swings, deeper voices, and increased breast size.
The tell-tale signal is somebody who used to carry some fat, however now he’s shredded and
muscular the same time throughout the complete yr.
As knowledgeable fitness mannequin you are often in a situation where you have to prepare for
a shoot in a matter of weeks. These are simply
two tales out of many who prove that steroid usage is totally regular amongst people who make their
residing based mostly on how their physique looks.
70918248
References:
testosteron-gel frauen nebenwirkungen (demo.accesslinkandcsng.com)
There are at present no FDA-approved medications to deal with stimulant use disorder.
There are presently no FDA-approved drugs to deal with inhalant use disorder.
Awareness and educational efforts are working to help prevent anabolic steroid abuse in schools and communities.
U-4770 is an illegally made synthetic (lab-made) opioid
that is about 7.5 instances the power of morphine.
Synthetic medication are substances which would possibly be synthetized or made in a laboratory.
Synthetic cathinones, also recognized as bath salts, are a category of lab-made stimulants chemically associated to substances found within the khat plant.
Regardless Of their reported toxicological results on the cardiovascular, hepatic
and neuro-endocrine systems, the AAS have been extensively
used in sports activities. The use of anabolic steroids
was banned by the Worldwide Olympic Committee for the first time on the Olympic
Games in Montreal in 1976. Androgenic anabolic steroids (AAS) are defined as natural, artificial or semi-synthetic drugs chemical compounds derived
from testosterone, used with the goal to improve bodily performance
by growing both muscle energy and mass. An undetermined proportion of anabolic steroid users could develop a anabolic steroid
use disorder. Anabolic steroid users also could give up other important activities for worry that they may miss
exercises, violate their dietary restrictions, or be prevented from utilizing anabolic steroids.
Some bodybuilders and athletes use anabolic steroids might take the steroids orally, inject them into muscle
tissue, or apply them to the skin as a gel or cream.
These doses could also be 10 to one hundred instances larger
than doses prescribed by medical professionals to treat medical situations.
In teenagers, nicotine use may cause changes to the development of the parts of the brain that management attention and learning.
A small amount of nicotine is utilized in nicotine replacement therapy to assist with withdrawal
signs. Nicotine alternative therapy merchandise include gum,
patches, sprays, inhalers, and lozenges. Taking an excessive amount of of
an opioid can slow breathing so much that the individual
suffocates. An overdose could be reversed if opioid overdose reversal
medications, including naloxone (sometimes bought as Narcan®),
are given rapidly. Methadone, buprenorphine, and naltrexone are all FDA-approved
medications to treat opioid use disorder (OUD).Lofexidine
is an FDA-approved medicine to scale back opioid withdrawal signs.
With this being mentioned, the vast majority (upwards of
90% or more) of anabolic steroid users obtained their product from legitimate
pharmacies and had been acquiring pure, proper, and sterile product for use.
As beforehand mentioned, the anabolic steroid black market was almost
nonexistent at the time. Following this, issues began to worsen as
nicely as shifting in a barely totally different path, as the media would now start increasing sensationalist reporting to include that of using anabolic
steroids among “high school boys”[1]. Following this, the picture of anabolic
steroids was further demonized by the government and the media in front of most of the people.
Testosterone has importance in plenty of functions within the physique, in addition to sexual needs,
muscle progress, and bone thickness. TRT’s main goal is to
increase sexual needs, which matches down usually when…
Supportive remedies and drugs interventions could also be needed
for severe dependancy. Medicines that have been used for treating anabolic
steroid withdrawal allow the natural hormonal system to restore.
In basic although, the DHT derivatives which would possibly be mostly leveraged by athletes are Primobolan, Masteron, Anavar and Winstrol,
they usually all share comparable overlapping effects on physique composition and performance.
Anabolic steroids help to rebuild tissues which have turn into weak due to critical
damage or sickness 6. Anabolic steroids are also used in sports activities to spice up power, construct muscles, reduce fats, improve sporting efficiency and speed
up restoration from damage 7, 8, 9, 10, eleven, 12. Doping with anabolic steroids is banned by most sports activities leagues and teams.
Folks who misuse anabolic steroids might embody athletes, bodybuilders and people who really feel they want to look muscular to feel good about themselves thirteen, 14, 15, sixteen, 17, 6, 18, 19, 20.
The evidence around whether or not anabolic steroids can significantly enhance athletic performance is limited eight.
However generally speaking, there was some research which has proven that people who use anabolic steroids will experience a rise
in muscle energy 9.
On high of that remarkable feat, Yang gained the gold a total of 11 instances at
the World Championships. With all his accomplishments, Yang has remained the most highly adorned Chinese swimmer.
Therese Johaug competed in cross-country skiing all through her profession, amassing a large cache of medals.
Johaug won three gold medals on the Junior World Championships and a whopping 14 at the World Championships.
She’s a three-time Olympian with 4 gold medals to her name,
three of which she gained at the 2022 Winter Video Games in Beijing.
Johaug’s professional profession spanned 14 seasons, from 2007 till her retirement from aggressive cross-country snowboarding at the finish of the
2022 season.
If the quantity of 19-norandrosterone within the urine is discovered to be much larger than a selected amount deemed as a
standard physiological stage, it can be presumed that the athlete or individual had
been utilizing Nandrolone. One Other instance, Winstrol (Stanozolol) can be detected
via the presence of 3’hydroxystanozolol within the urine,
which is a metabolite of Winstrol that lingers within the user’s urine for up to 10 days
following use[6]. The use of mass spectrometer can even detect non-metabolized Nandrolone molecules in urine because
of its distinctive properties. It is thru the detection of
the metabolites of the totally different anabolic steroid that basically determines the steroid detection times which were kind of established.
Progestins are steroid hormones which are usually prescribed to postpone warmth cycles or alleviate
false pregnancies in feminine canines and deal with benign prostatic hypertrophy
in male canines. They may also be used for some kinds of pores and skin problems or
to switch aggressive behavior. Megestrol acetate and medroxyprogesterone are the most commonly used progestins in canine.
I just want to share this great testimony to appreciate herbalist Isaac. A few months back, l found out I have HERPES. I had used different kinds of medication, which didn’t help. Then I have to do a research and found so many interesting testimonies on the internet how Herbalist Isaac helped people to cure herpes, I took his contact I found in the internet and I contacted him and he sent me herbal medication via courier service. Then i started taking the medicine according to his instruction, and within 6 weeks, I was free from HERPES. And for that, I will always be grateful to Lord Vasikar. If you need his help, kindly contact him on WhatsApp + (234)80 7544 9538 Email:drisaacherbscure2@gmail.com He also cures , HEPATITIS B, ALS, LUPUS, C.O.P.D, HIV/AIDS, EPILEPSY, LEUKEMIA, ASTHMA, CANCER, EMPHYSEMA, GENITAL WARTS, ES, ULCER, DIABETES, PARALYSIS, STROKE, HERPES, HSV-1, HSV-2, AUTISM, NEUROPATHY, INFERTILITY, Parkinson’s Disease, Alzheimer’s Disease and lots more. There’s no side infects when you take this herbal medicine.